Дипломная работа: Проектирование автоматической системы взвешивания вагонов в статике
На рисунке 1.1. изображена схема измерения веса вагона.
Пронумерованными стрелками показано направление потока информации от датчиков. Общее число датчиков выбрано - 8.
Теоретически для описания (задания) плоскости достаточно всего 3 точки. В данном случае необходимо 4 точки, т.к. возможно, что нагрузка на различные точки будет неравномерной, причем может очень сильно различаться. Весы двух платформенные - по этому, общее число точек контроля (датчиков) в два раза больше - 8 штук.
Так, как нагрузка распределяется между опорными точками, в которых расположены датчики, то каждый датчик преобразует частичный вес вагона. Для получения общего веса вагона необходимо просуммировать все частичные ве сы. Это можно сделать как до оцифровки, так и после. Оцифровка необходима для того, чтобы передать информацию (полученный вес) в компьютер. Причем данные в компьютер могут поступать в любой форме.
Предполагается располагать само устройство возле недалеко от платформ и рельсов. Дело в том, что полезный сигнал, снимаемый с датчиков очень мал (48...48000 мкВ). По этому, для уменьшения уровня помех и уменьшения потерь на соединительных кабелях расстояние должно быть малым. Само устройство подключается к компьютеру через последовательный порт.
Скорость передачи информации в компьютер можно задавать произвольно, т.к. измерение производится в статике.
1.2 Блок-схема устройства
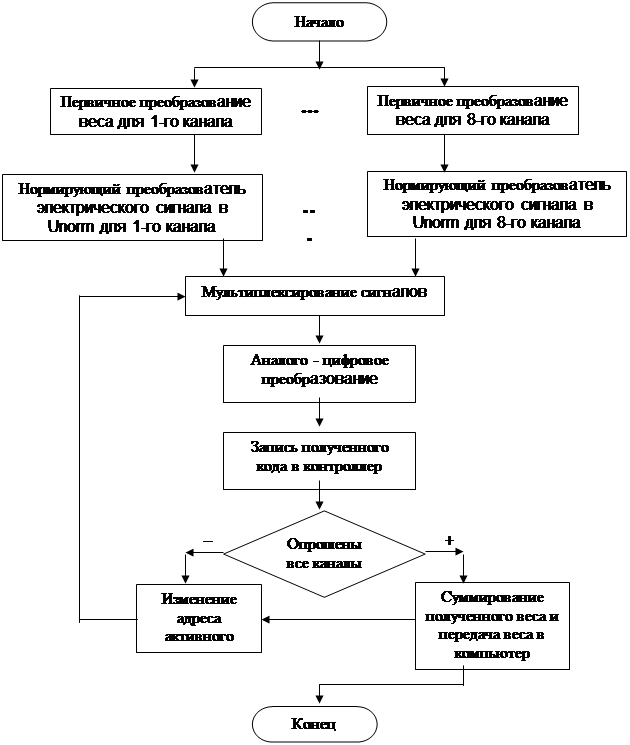
Рис 1.2.1.
На рисунке 1.2.1. изображена блок схема, поясняющая принцип работы схемы. Группа первичных преобразователей производит преобразование веса в соответствующие уровни напряжения. Далее нормирующие преобразователи формируют уровни напряжения Unorm для каждого канала в заданном диапазоне для того, чтобы напряжение было "удобным" для дальнейших с ним действий. Этот процесс происходит непрерывно и независимо от всех остальных.
В то же время происходит цифро-аналоговое преобразование выбранного канала. Причем используется один АЦП, поэтому сигналы мультиплексируются. Мультиплексор управляется микроконтроллером. Полученный код веса записывается в микроконтроллер. Затем, МК меняет адрес канала и процесс преобразования повторяется для нового канала. После того, как будут опрошены все каналы и будут записаны полученные коды, характеризующие частичный вес, происходит суммирование частичного веса. Эта сумма характеризует полный вес вагона.
Затем, данные с устройства передаются в последовательном коде в компьютер. Для этого используется драйвер последовательного порта RS-232. Программа-терминал на компьютере, при необходимости, считывает данные из буфера последовательного порта и высвечивает массу вагона на мониторе.
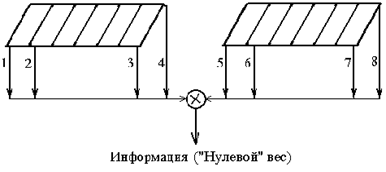
Рис 1.2.2.
На рис. 1.2.2. показана схема калибровки системы.
Калибровка в данном случае представляет собой коррекцию нуля - устройством учитывается вес платформы, рельсов и т.п.
Калибровка осуществляется автоматически и управляется микроконтроллером. Запуск коррекции осуществляется по нажатию кнопки оператора. При этом на мониторе компьютера должен показываться ноль. Следует отметить, что коррекцию производит непосредственно микроконтроллер по каждому каналу, причем компьютер в данной операции не участвует.
Наличие корректировки повышает точность измерения и повышает автономность (автоматичность) данной системы.
При необходимости можно сделать так, чтобы при калибровке, устройство посылало на компьютер "нулевой" вес - т.е. вес при отсутствии вагона - на компьютер. Это позволит контролировать правильность работы устройства.
2. Принцип действия блоков схемы
2.1 Первичный преобразователь
В роли первичного преобразователя выступает тензорезисторный мост. Исходя из количества тензодатчиков ![]() и максимальной
и максимальной ![]() массы взвешиваемого вагона выбираем тензодатчики типа ДСТВ -1 , рассчитанные на 16 тонн.
массы взвешиваемого вагона выбираем тензодатчики типа ДСТВ -1 , рассчитанные на 16 тонн.
Система с такими тензодатчиками может взвешивать вагоны, массой до ![]() . При этом существует запас на 38 тонн. Этот запас необходим, т.к. возможно, что вес не будет равномерно распределен между контрольными точками (датчиками). К тому же в взвешиваемый вес будет включаться и вес платформ.
. При этом существует запас на 38 тонн. Этот запас необходим, т.к. возможно, что вес не будет равномерно распределен между контрольными точками (датчиками). К тому же в взвешиваемый вес будет включаться и вес платформ.
Здесь учитывается, также то, что при торможении поезда на платформу действует дополнительное усилие. Т.к. данные тензодатчики способны выдерживать дополнительную нагрузку на 50% от номинальной, то
![]() ,
,
что позволяет выдерживать общую нагрузку
![]() , т.е. более, чем в 2 раза.
, т.е. более, чем в 2 раза.
Основные параметры тензодатчиков ДСТВ - 1. Табл. 2.1.
|
Параметр |
К-во Просмотров: 529
Бесплатно скачать Дипломная работа: Проектирование автоматической системы взвешивания вагонов в статике
|