Контрольная работа: Одночастотные радиолокационные станции
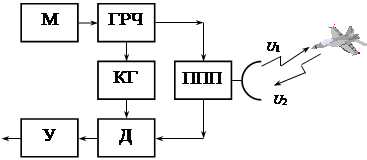 Структурная схема когерентно-импульсной РЛС показана на рис. 1. На выходе детектора (Д) образуются биения отраженного и опорного сигналов когерентного гетеродина (КГ). Однако сигнал U 2 имеет импульсный характер, поэтому даже при непрерывном опорном сигнале когерентного гетеродина биения возникают лишь во время существования отраженного сигнала.
Структурная схема когерентно-импульсной РЛС показана на рис. 1. На выходе детектора (Д) образуются биения отраженного и опорного сигналов когерентного гетеродина (КГ). Однако сигнал U 2 имеет импульсный характер, поэтому даже при непрерывном опорном сигнале когерентного гетеродина биения возникают лишь во время существования отраженного сигнала.
Рис. 1. Структурная схема когерентно-импульсной РЛС
Рассматривая только выходное напряжение детектора, которое после фильтрации является чисто импульсным, можно получить следующие зависимости [1] для сигналов движущейся и неподвижной целей:
 (1.1)
(1.1)
(1.2)
![]() где
где
сигнал неподвижной цели; U m дц - амплитуда сигнала движущейся цели; М = U m дц / U m 2 нц - коэффициент модуляции сигнала биений.
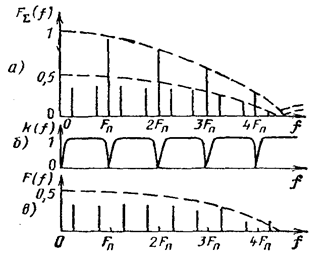
 Формулы (1.1) и (1.2) дают последовательности модулированных по амплитуде видеоимпульсов, спектральный состав которых показан на рис. 2.
Формулы (1.1) и (1.2) дают последовательности модулированных по амплитуде видеоимпульсов, спектральный состав которых показан на рис. 2.
Рис. 2. Спектральный состав видеоимпульсов на выходе детектора
Сравнивая импульсы движущихся и неподвижных целей, можно сделать заключение, что основным отличием временных функций, соответствующих этим последовательностям, будет наличие переменной составляющей в сигнале движущейся цели. Переходя к спектральным представлениям, можно утверждать, что спектр немодулированных видеоимпульсов, соответствующих функции времени f 1 (t ), будет состоять лишь из гармоник частоты повторения (рис. 2, а ). Спектр знакопеременной последовательности модулированных видеоимпульсов, соответствующих функции времени f 2 (t ), будет состоять из гармоник nF п ± F м (рис. 2 б ). Наконец, спектр последовательности видеоимпульсов, соответствующих функции времени f S (t )=f 1 (t )+f 2 (t ), будет состоять из гармоник nF п и nF п ± F м (рис. 2 в ).
Следовательно, для селекции движущихся целей необходимо компенсировать на выходе элемента сравнения импульсные последовательности с постоянной амплитудой или подавлять в спектре сигнала после элемента сравнения все гармоники частоты повторения nF п .
Однако при построении устройств селекции движущихся целей в когерентно-импульсных РЛС следует учитывать наличие так называемого стробоскопического эффекта.
Запишем выражение (1.2) с учетом фильтрации постоянной составляющей:
Очевидно, что это выражение будет однозначной функцией п только в пределах однозначности функции косинуса его аргумента. Поэтому можно считать, что для однозначной связи U m б и n необходимо, чтобы
Это соотношение должно выполняться для любого п . Поэтому, полагая п = 2, получаем пределы однозначного соответствия частоты биений импульсной последовательности частоте Доплера
При увеличении f д > F п /2 за счет периодичности косинуса получаем периодическое повторение указанного соответствия.
На рис. 3 показана зависимость частоты биений от частоты Доплера. Видно, что в случае, когда частота Доплера кратна частоте повторения, последовательность импульсов оказывается немодулированной, так как f б =0.
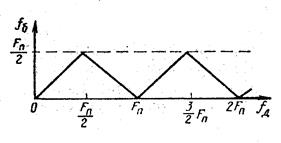
Рис. 3. Зависимость частоты биений от частоты Доплера
С учетом этого и выражение для значения частоты Доплера получаем
Таким образом, модуляция импульсов движущейся цели отсутствует, а следовательно, сигналы движущейся и неподвижной целей при радиальных скоростях, удовлетворяющих условию (1.3), не различаются. Эти скорости называются «слепыми». Цель, двигающаяся с одной из «слепых» скоростей, за период повторения приближается или удаляется от радиолокатора на расстояние, кратное целому числу половины длины волны несущего колебания радиолокатора. При этом разность фаз прямого и отраженного сигналов за период повторения будет изменяться на величину, кратную 2p.
Способ построения когерентно-импульсных систем селекции выбирается в зависимости от соотношения параметров импульсной модуляции. Обычно различают когерентно-импульсные РЛС, работающие в режимах малой и высокой скважности. Естественно, граница разделения весьма условна и соответствует значению скважности Q = 10. При Q < 10 имеем режим малой скважности, а при Q > 10 - большой скважности [1].
Основным преимуществом когерентно-импульсной РЛС, работающей в режиме высокой скважности, является высокая разрешающая способность по дальности.
Различают истинно когерентные и псевдокогерентные РЛС, которые часто называют также когерентными РЛС селекции движущихся целей. Различие этих систем заключается в способе построения передающего
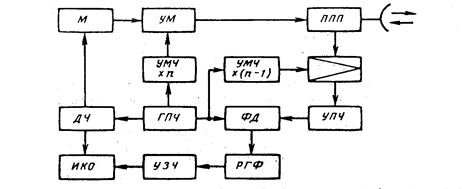
Рис. 4. Структурная схемы истинно когерентной РЛС высокой скважности
устройства и способе получения опорного когерентного напряжения, что приводит к различному интервалу когерентности сигналов РЛС.
На рис. 4 приведен пример схемы истинно когерентной РЛС высокой скважности. Передатчик построен по многокаскадному принципу. Стабильные колебания задающего генератора промежуточной частоты (ГПЧ) умножаются по частоте и усиливаются в усилителе мощности (УМ). Одновременно в этом же каскаде происходит импульсная модуляция сигнала с высокой скважностью и частотой повторения, зависящей от модулятора (М). С помощью второго умножителя частоты (УМЧ), на который подаются колебания задающего генератора промежуточной частоты, формируется гетеродинный сигнал, используемый для преобразования частоты принимаемых сигналов в смесителе приемника. Усиленные в УПЧ сигналы сравниваются с опорным колебанием генератора промежуточной частоты на фазовом детекторе (ФД).