Контрольная работа: Устройство и принцип работы аппаратуры ПОНАБ-3
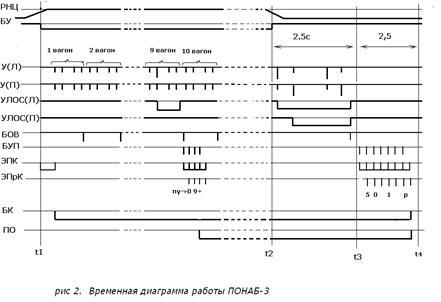
При удалении хвостовой части поезда с участка контроля напряжение на выходе РЦН повышается и в момент времени t2 блок БУ вырабатывает команду конца контроля. По этой команде закрываются заслонки напольных камер и запускается система автоматической проверки исправности устройств ПОНАБ-3 (система автоконтроля). При этом имитируется проход четырехосного вагона по участку контроля. С выхода БУ на входы ФС1 и ФС2 задается программа сигналов от прохода колес четырехосного вагона над датчиками Д1—Д4, а в моменты, когда в зоне обзора оптических систем должны находиться буксы первой и третьей колесных паp для одной стороны поезда, второй и четвертой — для другой стороны поезда, включаются имитаторы нагретых букс, расположенные внутри напольных камер перед оптическими системами. В этом случае блоки УЛОС правой и левой сторон вырабатывают сигналы «тревоги», а блок БОБ — сигнал отметки прохода контрольного вагона. Сигналы «тревоги» и сигнал отметки подаются на устройства АПД и по ним формируется код знака исправности аппаратуры «Р». При отсутствии одного из сигналов «тревоги» или сигнала отметки прохода вагона, что свидетельствует о неисправности аппаратуры, в устройствах АПД формируется код знака неисправности «Н».
Цикл автоконтроля не превышает по времени 2,5 с.
Через 2,5 с после удаления хвоста поезда с участка контроля и момент времени t3 по команде с блока БУ начинается передача общих данных о поезде. При этом по команде блока БУП формируются семь циклов передачи информации АПД.
В первом и втором циклах передается информация об общем количестве вагонов в поезде, в третьем и пятом — код знака «Пробел», в четвертом— информация об общем количестве вагонов с перегретыми буксами в поезде, в шестом — код знака исправности или неисправности аппаратуры и в седьмом цикле — код знака «Возврат каретки». Вся информация печатается в одну строку. Если в проконтролированном поезде не было обнаружено перегретых букс, регистрируются только общие данные.
После приема кодовой комбинации «Возврат каретки» и ее дешифрации каретка ПУ возвращается в исходное состояние и происходит перевод строки. Сигнал с дешифратора поступает также на блок БКи отключает схему сигнализации наличия поезда на участке контроля. Время передачи общих данных о поезде не превышает 2,5 с.
Н момент t4 блок БУ вырабатывает сигнал начальной установки, по которому запрещается работа устройств перегонного оборудования до захода следующего поезда в зону контроля напольных устройств.
Для связи обслуживающего персонала во время проведения ремонтно-профилактических работ между помещением для постового оборудования и помещением пункта регистрации данных организуется телефонная связь.
Временная диаграмма для заданного варианта представлена на рис 2.
Задача 2
Построить временную диаграмму работы устройства отметки прохода физических подвижных единиц аппаратуры ПОНАБ-3 с учетом неисправности одного из функциональных элементов (отсутствие сигнала на входе).
Номер прошедшего после локомотива 4-х осного вагона----- 2
Неисправный элемент схемы --------------------------------------- Т3
Устройство предназначено для выработки сигнала отметки прохода колес вагона или секции локомотива над датчиками Д1—Д4 независимо от количества осей в подвижной единице (до 14 осей). Устройство размещается в блоке отметчика вагонов стойки аппаратуры и включает логические схемы НЕ1— НЕ9 и И1—И5, триггеры Т1—Т5, схемы задержки времени D1— D2, трехразрядные реверсивные двоичные счетчики СТ1 и СТЗ и двухразрядный реверсивный двоичный счетчик СТ2 (рис. 3).

Рис 3.Функциональная схема устройства отметки прохода физических подвижных единиц
Принцип работы устройства основан на определении моментов времени, когда в зоне между датчиками Д1 и ДО находится группа осей одной тележки подвижной единицы и когда эта зона освобождается после прохода первой группы осей. Одним из условий распознавания физических подвижных единиц по этому принципу является симметричность расположения групп осей в каждой подвижной единице, т. е. количество осей в каждой тележке должно быть одинаковым. Это условие соблюдается для всех типов грузовых и пассажирских вагонов, для секций электровозов и тепловозов отечественного подвижного состава.
Согласно другому условию максимально возможное расстояние между двумя соседними осями в одной группе осей подвижных единиц bдолжно быть меньше минимально возможного расстояния между крайними внутренними осями с. Максимальное значение расстояния bравно для отечественного подвижного состава 3300 мм (локомотивов), а минимальное значение расстояния с — 3800 мм (двухосный крытый вагон).
Датчики прохода колес Д1 и ДО размещаются на расстоянии а, которое меньше минимально возможного расстояния Сmin и больше максимально возможного расстояния bmaxподвижных единиц, т. е. должно соблюдаться условие
bmax < a < Сmin
В аппаратуре ПОНАБ-3 величина расстояния, а выбрана равной 3600 мм. Расстояние dмежду датчиками Д1, Д2 и ДЗ, Д4 равно 500 мм. Для работы устройства отметки прохода подвижных единиц важным является то, что расстояния между датчиками Д1—Д2 и ДЗ—Д4 не должно быть больше минимально возможного расстояния между соседними осями подвижных единиц.
Работа устройства поясняется временной диаграммой (рис 4).
При проходе колес подвижных единиц над датчиками Д1— Д4 двухполярные импульсные сигналы с датчиков Д1—Д2 поступают на входы схем НЕ1—НЕ2 первого формирователя сигналов, а с датчиков ДЗ—Д4 — на входы схем НЕЗ—НЕ4 второго формирователя. Каждый формирователь содержит триггер (Т1 или Т2) и схему задержки (D1 или D2). Когда колесная пара проходит датчик Д1 (ДЗ), схема НЕ1 (НЕЗ) по отрицательному сигналу с датчика вырабатывает импульс положительной полярности, который подается на единичный вход триггера Т1 (Т2). Триггер до этого момента был установлен в состояние «О» сигналом начальной установки (СНУ), а при поступлении сигнала с выхода схемы НЕ1 (НЕЗ) занял состояние «1» (момент t1 или t2 на временной диаграмме). При этом запускается схема задержки D1 (D2), которая вырабатывает отрицательный импульс длительностью около 5 мс.
При проходе этой же колесной пары над датчиком Д2 (Д4) положительный импульс с НЕ2 (НЕ4) подается на нулевой вход триггера Т1(Т2) и триггер опрокидывается в состояние «О». При проходе других колес над датчиками Д1—Д4 работа схемы повторяется. Таким образом, при проходе каждой колесной нары над Д1—Д2 на выходе схемы D1 формируется импульс в момент поступления сигнала сдатчика Д1, а при проходе колес над ДЗ—Д4 на выходе схемы D2 формируется импульс в момент поступления сигнала с датчика ДЗ. Такое построение схемы позволяет избежать подачи на вход устройства нескольких сигналов от датчика при проходе в его зоне одной колесной пары. Когда за счет наводки от импульсов тягового тока в рельсах, вибраций датчика при проходе колес на выходе его появляются сигналы помехи, которые по времени отстоят недалеко от сигналов, вырабатываемых датчиком, то триггер Т1 (Т2) опрокинется в единичное состояние только один раз, что приведет к подаче на устройство с выхода схемы Dl (D2) только одного импульса. Если сигналы помех с датчика Д1 (ДЗ) прекращаются до момента захода колеса в зону действия датчика Д2 (Д4), то сбоя в работе устройства не произойдет.
До момента захода поезда на участок контроля устройство отметки прохода физических подвижных единиц находится в исходном состоянии, так как на ряд его элементов подается сигнал СНУ. При этом триггеры ТЗ, Т4, Т5 и двоичные счетчики СТ1, СТ2, СТЗ установлены в нулевое состояние, счетчики открыты по входам сложения, а логические схемы совпадения на два входа И1 и И2 открыты по одним входам с нулевых выходов триггеров ТЗ и Т5 соответственно. Схемы ИЗ—И5 открыты по всем четырем входам сигналами с выходов счетчиков и схем НЕ8, НЕ9.
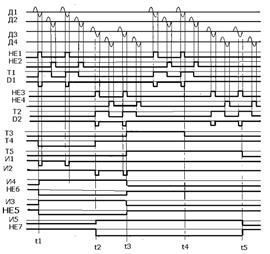
Рис 4 Временная диаграмма работы устройства отметки прохода физических подвижных единиц
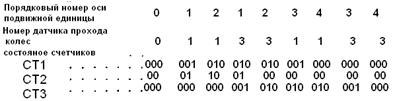
При движении по участку контроля первой четырехосной подвижной единицы поезда (локомотива) состояние двоичных разрядов счетчиков после прохода колесных пар над датчиками Д1 и ДЗ приведено ниже.