Курсовая работа: Магнитоупругий эффект
Один из возможных типов магнитоупругого преобразователя представлен на рисунке 1.1, а. Он представляет собой ферромагнитный сердечник с намотанной на нем катушкой. При действии силы – F в материале сердечника возникает механическое напряжение σ, изменяется μr следовательно, и магнитное сопротивление сердечника RM , а также индуктивность катушки L. Формула преобразований имеет вид
F → σ →μ →RM →L. (1.2)
Магнитоупругие преобразователи могут иметь две обмотки (рисунок 1.1,б). Такие преобразователи являются трансформаторными. При действии силы вследствие изменения магнитной проницаемости изменяется взаимная индуктивность М между обмотками и ЭДС вторичной обмотки Е. Формула преобразования имеет вид
F → σ → μr →RM →М→Е. (1.3)
При расчете преобразователя и его чувствительности нужно в соответствии с законами и правилами механики рассчитать механические напряжения σ в элементах конструкции и их зависимость от измеряемой силы σ = σ (F).
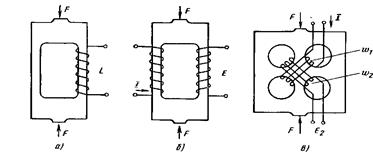
Рисунок 1.1-Магнитоупругие преобразователи
Зависимость μr =μr (σ) в ферромагнитных веществах в общем случае нелинейна. Однако при небольших механических напряжениях можно считать, что относительное изменение магнитной проницаемости пропорционально σ:
η=Δμ/ μrном=Sμσ, (1.4)
где Δμ = μr — μr ном ;
μr - значение магнитной проницаемости при воздействии σ;
μr ном - номинальная магнитная проницаемость при σ = 0;
Sμ - чувствительность материала.
Магнитная проницаемость μr ном зависит от напряженности поля Н. Для увеличения Δμ целесообразно работать при таких Н, при которых μr ном максимальна. Наибольшую чувствительность Sμ имеют железоникелевые сплавы, меньшую — железокобальтовые сплавы и кремниевые стали.
Зная конфигурацию и размеры преобразователя и зависимость магнитной проницаемости μr от измеряемой силы F, можно определить зависимость сопротивления магнитной цепи, а также индуктивности L или коэффициента взаимоиндукции Μ преобразователя:
L = w2 /RM ; Μ = w1 w2 /RM (1.5)
Магнитопровод преобразователя следует делать без воздушных зазоров. Даже пришлифованные друг к другу стыки магнитопровода имеют большое магнитное сопротивление и уменьшают чувствигель-ность преобразователя. При действии измеряемой силы воздушные зазоры изменяются, что приводит к возникновению погрешности.
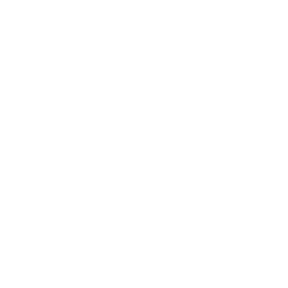
Рисунок 1.2 - Магнитное поле создаваемое обмоткой питания
При низких частотах питающего напряжения или в случае, когда сердечник собран из достаточно тонких пластин, магнитное поле равномерно заполняет все сечение преобразователя и поверхностный эффект выражен слабо. При сильно выраженном поверхностном эффекте магнитное сопротивление увеличивается, а чувствительность уменьшается.
Лучшими метрологическими характеристиками обладает маг-нитоанизотропный трансформаторный преобразователь, схема которого показана на рисунке 1.1, в. Пока измеряемая сила не действует, магнитопровод такого преобразователя магнитоизотропен: его магнитная проницаемость одинакова во всех направлениях. Под действием механических напряжений магнитная проницаемость изменяется в направлении напряжения. Это изменяет магнитное сопротивление материала в том же направлении. Под действием механических напряжений материал становится магнитоанизотропным.
Преобразователь собран из пакета пластин, имеющих четыре отверстия. В отверстии уложены две обмотки: питания w1 и измерительная w2 . Они расположены под углом 45° к направлению действия силы и под углом 90 ° друг к другу. При отсутствии измеряемой силы F магнитное поле, создаваемое обмоткой питания w1 , направлено параллельно виткам измерительной обмотки w2 и не заходит в нее (рисунок 1.2,а). В измерительной обмотке ЭДС не индуцируется. Под действием измеряемой силы магнитная проницаемость в направлении ёе действия изменяется и изменяется магнитное сопротивление в том же направлении. Это деформирует магнитное поле (рисунок 1.2,б). Магнитный поток пронизывает измерительную обмотку и индуцирует в ней ЭДС E2 , пропорциональную действующей силе.
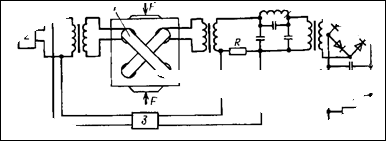
Рисунок 1.3 - Схема включения трансформаторного магнитоанизотропного преобразователя
Схемы включения. Магнитоупругие индукционные преобразователи включаются в мостовые измерительные цепи. В плечо, смежное с измерительным преобразователем, включается такой же преобразователь для компенсации аддитивных, погрешностей. Он обычно не нагружается — прибор строится по дифференциальной схеме первого типа. Питание моста производится от феррорезонансного стабилизатора.
Схема включения трансформаторного магнитоанизотропного преобразователя приведена на рисунке 1.3. Первичная обмотка 1 питается от феррорезонансного стабилизатора 2. На выходе у ненагруженно-го преобразователя имеется некоторое остаточное напряжение. Для его компенсации в цепь включен резистор R, на который подается напряжение через фазосдвигающую цепочку 3. Напряжение питания преобразователя выбирается так, чтобы режим его работы был близок к режиму насыщения магнитной цепи. При этом на выходе преобразователя имеется напряжение верхних гармоник значительной величины. Для защиты от гармоник схема содержит фильтр верхних частот 4. Напряжение выпрямляется двухполупериодным выпрямителем 5 и подается на магнитоэлектрический измерительный механизм 6. Фильтр нижних частот 7 служит для сглаживания пульсаций выпрямленного напряжения. При измерении быетропеременных процессов в качестве измерительного механизма включается гальванометр све-толучевого осциллографа.
Магнитоупругие трансформаторные преобразователи могут работать также с автоматическими потенциометрами переменного тока.
Погрешность магнитоупругих преобразователей. Функция преобразования магнитоупругих преобразователей, как правило, нелинейна. Имеется ряд методов уменьшения нелинейности. Нелинейность уменьшается при сокращении диапазона измерения измеряемой силы; если наряду с измеряемой силой преобразователь нагружается некоторой дополнительной постоянной силой; при соответствующем выборе магнитного режима преобразователя; при применении магнитоанизотроп-ных материалов, имеющих различную магнитную проницаемость в различных направлениях. Такие материалы получают в результате определенной технологической обработки — ковки, протяжки, прокатки и т. д. Применение этих мер позволяет уменьшить погрешность, происходящую вследствие нелинейности, до 1,5—2 %.
Функция преобразования при увеличении нагрузки магнитоупру-гих преобразователей отличается от функции преобразования при уменьшении нагрузки. Это отличие имеет гистерезисный характер и обусловлено магнитным и механическим гистерезисом. При статических измерениях гистерезис преобразователя больше, чем при динамических. Для уменьшения погрешности, вызванной гистерезисом, рекомендуется изготавливать преобразователи из материалов, имеющих возможно больший предел упругости и возможно меньшую петлю магнитного гистерезиса. Максимальные механические напряжения в магни-тоупругом материале должны быть в 6—7 раз меньше его предела упругости. Погрешность, обусловленная гистерезисом, уменьшается после тренировки преобразователя. Тренировка производится 5—1 Обратным нагружением силой, соответствующей пределу изменения преобразователя. Гистерезис может возникнуть также в результате сил трения, если, например, магнитопровод не сплошной, а составной. Приведенную погрешность, вызванную гистерезисом, можно снизить до 0,5-1 %.