Курсовая работа: Проектирование принципиальной схемы стенда для исследования свойств позиционного регулятора
- косвенного действия
5) По виду используемой энергии:
- электрические
- пневматические
- гидравлические
- комбинированные
6) По закону:
- пропорциональные ( П )
- интегральные ( И )
- пропорционально- интегральные ( ПИ)
- пропорционально- дифференциальные ( ПД )
- пропорционально- интегрально- дифференциальные ( ПИД )
Рассмотрим несколько примеров позиционных регуляторов:
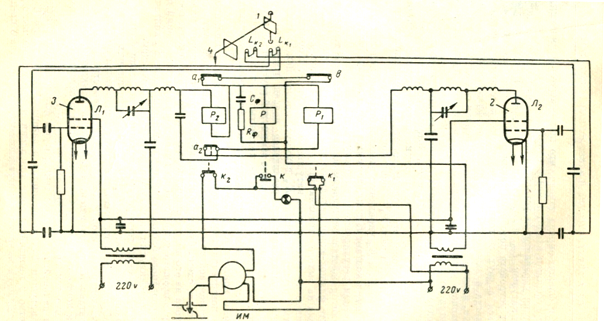
Рис. 1 Схема трехпозиционного регулятора МРЩПр-54
Регуляторы МРЩПр-54 предназначены для позиционного регулирования и сигнализации предельных значений температуры и подразделяются на двух- и трехпозиционные.
Регулятор состоит из измерительной части 1, двух электронных управляющих устройств 2 и 3, выполняемых на лампах Л1 и Л2, трех электромагнитных реле Р, Р1 и Р2 с контактами и исполнительного механизма ИМ.
Измерительной частью прибора является магнитоэлектрический милливольтметр с присоединенной к нему термопарой, установленной в объекте регулирования.
Каждое из управляющих устройств представляет собой одноламповый генератор высокой частоты. Катушки индуктивности Lн1 и Lн2сеточных контуров генераторов расположены за шкалой прибора на подвижных кронштейнах и могут устанавливаться вручную во всем диапазоне шкалы около заданного значения температуры. Положение катушек можно определить при помощи двух стрелок индексов, вынесенных на шкалу прибора. Взаимное расположение катушек и флажка-экрана таково, что при повороте рамки милливольтметра флажок входит в зазор одной из катушек.Действие управляющих устройств основано на изменении индуктивности катушек Lк1 и Lк2сеточных контуров. Параметры управляющих устройств подобраны таким образом, что последние могут находиться в двух состояниях: генерации колебаний высокой частоты, когда в зазоре катушки находится флажок-экран, и срыва генерации, когда флажок вне зазора. В первом случае ток на выходе управляющего устройства равен 5 ма. Во втором случае сила тока повышается до 25 ма.
Выходной ток управляющих устройств поступает в катушки электромагнитных реле Р, Р1 и Р2 , которые составляют релейный блок прибора. Каждое реле снабжено парой ртутных контактов (К, К1 и К2 ). Кроме того, реле Р2 имеет два нормально замкнутых контакта а1 и а2 , а реле Р1г — один контакт b.
Контакты К1 и К2 управляют электромоторным исполнительным механизмом, а контакт К включает сигнальную лампу при нормаль-лом значении регулируемой температуры.
Регулятор работает следующим образом. При низкой температуре в объекте флажок-экран находится вне зазоров катушек Lк1 и Lк2. Сила тока на выходе управляющих устройств — 25 ма. Возбуждены включенные последовательно катушки реле Р% и Р. Нормально разомкнутый ртутный контакт К2 замкнут, привод исполнительного механизма срабатывает на увеличение подачи греющего агента в объект регулирования. Нормально замкнутый ртутный контакт К — разомкнут. Нормально замкнутые контакты а1 и а2 разомкнуты. Катушка реле Р1 обесточена вследствие размыкания контакта а2 , и ртутный контакт Кг разомкнут.
При повышении температуры и повороте стрелки милливольтметра флажок войдет в зазор катушки Lк2.Управляющее устройство правой части схемы будет работать, как генератор высокой частоты, и сила тока на его выходе снизится до 5 ма. Но это изменение состояния управляющего устройства не вызовет никаких изменений в состоянии релейного блока, так как управляемый реле Р2 контакт а2 остается разомкнутым, а катушка реле Р1 обесточенной.
При достижении температурой заданного значения флажок войдет в зазоры обеих катушек Lк1 и Lк2. Оба управляющих устройства самовозбуждаются и их выходные токи уменьшаются до 5 ма. Сердечники электромагнитов Р и Р2 отпустят поворотные якоря. Ртутный контакт К 2 разомкнется, а контакт К замкнется. Замкнутся также и контакты а1 и а2 - Сигнальная лампа загорается, оповещая о том, что температура нормальная.
При дальнейшем подъеме температуры флажок-экран выйдет из зазора катушки LК2 , но останется в зазоре L Кг В управляющем устройстве 2 произойдет срыв генерации и увеличение выходного тока до 25 ма, в то время как в управляющем устройстве 3 по-прежнему будут генерироваться колебания высокой частоты и выходной ток будет иметь силу около 5 ма. Катушка реле Р1 окажется возбужденной, а ртутный контакт К г замкнутым. Электромоторный привод сработает на уменьшение подачи греющего агента в объект регулирования. Одновременно с замыканием контакта Кг произойдет размыкание контакта b, шунтирующего катушку реле Р, которая оказывается соединенной последовательно с катушкой реле Р1, и ртутный контакт К разомкнется. Сигнальная лампа, показывающая нормальную температуру, погаснет.
Возможность выхода флажка из катушки в направлении повышения температуры исключена благодаря специальному ограничителю хода стрелки милливольтметра. [1, с333]
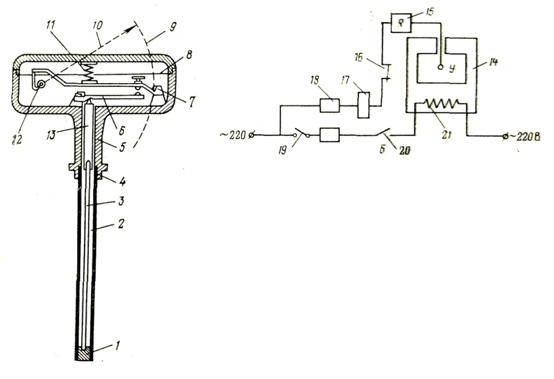
Рис. 2 Двухпозиционный регулятор: дилатометрический термометр с контактной системой
1, а). Термометр состоит из трубки 2, изготовленной из металла с большим коэффициентом линейного расширения (медь, латунь, алюминий, сталь) и стержня 3, изготовленного из материала с малым коэффициентом линейного расширения (кварц, фарфор, инвар). Стержень 3 опирается на пробку в трубке 2, которая ввернута в головку 5. В последней помещен рычажный передаточный механизм 6, 7, 8 и 12, снабженный электрическими контактами. Термометр при помощи ниппеля 4 ввинчивается в бобышку, укрепленную в нагревательной печи 14
Вместе с ним перемещаются вниз концы рычагов 6 и 7. Движение далее передается стрелке 10, которая указывает на шкале 9 температуру в градусах.
При перемещении рычага 7 вниз контакт между ним и рычагом 8 контакта 16 на рис. 10.1,6 размыкается. При этом обесточивается катушка 17 контактора, что обеспечивает размыкание контакта 20 и отключение нагревателя 21. При понижении температуры в печи трубка 2 укорачивается, что вызывает замыкание контактов между рычагами 7 и 8 и в конечном итоге включение электронагревателя 21 печи 14 (рис. 10.1,6).
Установка заданного значения регулируемой величины (температуры) производится изменением жесткости пружины 11.
В реальных двухпозиционных регуляторах изменение выходного сигнала от минимального до максимального значения и наоборот происходит при различных значениях входной величины. Разность между значениями входной величины в моменты изменения выходного сигнала называют зоной нечувствительности регулятора. Минимальная величина зоны нечувствительности зависит от зазоров и сил трения, а также обусловлена необходимостью создания определенных усилий для размыкания электрических контактов. [2, с175]
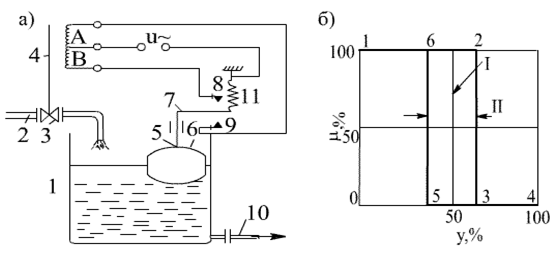
Рис. 3 . Принципиальная схема (а) и статическая характеристика (б) Пз регулятора уровня