Курсовая работа: Расчет основных характеристик импульсно-фазовой радионавигационной системы "Лоран-С" и приемоиндикатора этой системы
Увеличение импульсной мощности ограничивается эффективностью антенн и их электрической прочностью. Увеличение длительности импульса не приводит к желаемому результату, так как в импульсно-фазовой системе используется только начальная часть импульса длительностью 30–40 мкс, которая не подвержена воздействию пространственной волны. И, наконец, увеличение средней мощности можно получить, уменьшая значение Т. Однако величина Т, как указывалось выше, определяет возможность приема сигналов ведущей и ведомых станций без перекрытия их между собой во всей рабочей зоне системы. Поэтому уменьшение значения Т допустимо до определенных значений.
В системе «Лоран‑ С» применен особый способ увеличения средней мощности. Он заключается в том, что. станция излучает не один импульс за период Т, а целую серию, состоящую из восьми импульсов на ведомых станциях и девяти–на ведущей. Девятый импульс излучается для визуального опознавания ведущей станции и для передачи простейших команд ведомым станциям. Длительность каждого импульса 100–120 мкс на уровне 6 дБ, промежуток между импульсами в серии 1000 мкс, т.е. длительность всей серии из восьми импульсов составляет 7000 мкс.
Излучения серии («пакета») приводят к техническим усложнениям системы. Основной из причин усложнения является необходимость устранения влияния пространственных радиоволн кратного отражения каждого предыдущего импульса «пакета» на последующий поверхностный импульс в серии.
Устранение влияния пространственных волн от предыдущих импульсов на последующие достигается применением фазового кодирования, которое заключается в изменении фазы колебаний высокочас тотного заполнения в каждом импульсе серии на 180°. При этом фазирование импульсов четных серий отличается от фазирования нечетных серий и для устранения влияния пространственных волн используется два периода Т повторения серий импульсов.
В табл. 1 показано фазовое кодирование, примененное в системе «Лоран‑С». Здесь знак « +» условно отвечает фазе несущих колебаний, принятой за 0°, а знак « –» изменению этой фазы на 180°.
Таблица 1
| Излучения | Ведущая | Ведомая |
| Импульсы | 1 2 345678 | 1 2345678 |
| Четные серии | + + – – + – + – | + + + + + – – + |
| Нечетные | + – – + + + + + | + – + – + + – – |
Фазовое кодирование импульсов в серии устраняет влияние пространственных волн предыдущего импульса в серии на последующий и облегчает автоматическое опознавание ведущей станции и слежение за ней при превышениях уровня шумов над сигналом. В настоящее время осуществляется автоматическое слежение за сигналами ведущей станции до соотношений сигнал / помеха = 1: 10 (20 дБ) на отсчетном уровне импульсов. При таком высоком уровне шумов визуальное опознавание сигналов станции на экране индикатора невозможно, так как шумы полностью маскируют полезные сигналы.
Сигналы «Лоран‑ С» используются не только для навигации, но и в качестве сигналов точного времени.
Принцип работы приемоиндикатора в режиме измерения
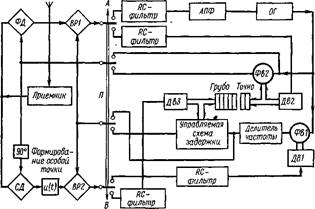
Блок-схема приемоиндикатора ИФ РНС в режиме точных измерений
Упрощенная блок-схема приемоиндикатора в режиме измерения промежутка времени между моментами прихода сигналов ведущей и одной из ведомых станций.
Все элементы приемоиндикатора, осуществляющие фазовое кодирование и поиск, из этой схемы исключены для большей наглядности изложения. С этой же целью – для облегчения понимания основных принципов работы – можно представить, что ведущая и ведомая станции излучают не «пакеты» радиоимпульсов, а одиночные радиоимпульсы.
Принимаемые импульсы ведущей и ведомой поступают на фазовый детектор ФД и синхронный детектор СД. Схема СД, не отличается от схемы ФД, только опорное колебание СД сдвинуто по фазе на 90° по отношению к опорному напряжению ФД.
Пусть сигналы ua ( t ) и ив ( t ) ведущей и ведомой станций на выходе приемника имеют вид:
иА (t) = U (t–t A ) sin w(t–tA ) = U (t–tA ) sin (wt–jA );
и B (t) = U (t–tB ) sin w(t–tB ) = U (t–tB ) sin (wt–jA ),
где tA и tB – моменты прихода сигналов А и В. Эти моменты отсчитываются от момента излучения сигнала ведущей станции А. Функции U ( t – t A ) и U ( t – t B ) имеют смысл лишь в пределах длительности импульса tи ; например, U ( t –tA ) = 0 при t < tA и t > tA + t и .
Фазовая автоподстройка опорного генератора сигналами ведущей станции производится следующим образом. Поиск передней части поверхностного сигнала предполагается уже выполненным. Поэтому в схеме должна осуществляться соответствующая коммутация переключателя П в такт приема сигналов береговых станций, а опорные кратковременные стробы временного различителя ВР1 на выходе ФД должны выделять лишь ту часть напряжения рассогласования, которая соответствует передней части поверхностных радиоимпульсов. Отстробированные напряжения передаются на блок фазовой автоподстройки АПФ опорного генератора. В результате фаза j0 опорного генератора изменяется до тех пор, пока не будет отличаться точно на 90° от фазы ВЧ заполнения радиоимпульса и постоянное напряжение на выходе ФД, обусловливаемое поверхностным радиоимпульсом, не станет равным нулю. Таким образом, фаза j» колебания на выходе опорного генератора будет хранить память о фазе ВЧ заполнения, поскольку j0 = jА + 90°. Фаза опорного напряжения СД при этом будет точно совпадать с фазой ВЧ заполнения поверхностного радиоимпульса ведущей станции.
Поэтому на выходе СД появится видеоимпульс U ( t – tA ). Он поступает на схему формирования напряжения, имеющего одну «точку» смены знака в пределах переднего фронта радиоимпульса. Пусть эта точка отстоит на интервал t0 от начала импульсов. С выхода схемы формирования особой точки напряжение поступает на временной различитель ВР2 и служит для уточнения временного положения измерительных опорных стробов. Опорные стробы, как видно из блок-схемы, получаются из колебаний опорного генератора, прошедших фазовращатель Фв1 и делитель частоты. На выходе делителя частоты и формируются измерительные стробы ведущего канала. Длительность каждого строба 3–5 мкс, а период повторения Т равен периоду повторения сигналов береговых станций. Если эти стробы не совпадают с особыми точками огибающих радиоимпульсов ведущей станции, на выходе ВР2 появится сигнал рассогласования. Сигналы рассогласования с выхода ВР2 имеют вид кратковременных видеоимпульсов с длительностью, равной длительности опорных стробов. Полярность этих видеоимпульсов определяется стороной отклонения опорных стробов от истинного положения особой точки огибающей. Кратковременные сигналы рассогласования накапливаются в соответствующем RС-фильтре и, после усиления, управляют положением ротора фазовращателя Фв1 до тех пор, пока рассогласование не будет исключено. Временное положение t ДЧ опорных стробов с выхода делителя частоты станет совпадать с особой точкой, т.е. t ДЧ = tA + t 0 .
При движении судна таким образом будет вестись автоматическое слежение за фазой и огибающей сигналов ведущей станции.
Рассмотрим теперь работу измерительного канала ведомой станции. Во время прихода сигналов ведомой станции опорное напряжение на ФД поступает через фазовращатель Фв2. Если на выходе ФД имеется сигнал рассогласования, то этот сигнал после накопления в RC ‑ фильтре и соответствующего усиления приведет во вращение двигатель Дв2. Положение ротора Фв2 будет изменяться до тех пор, пока сигнал рассогласования не станет равным нулю, а фаза колебания jф на выходе фазовращателя не будет отличаться точно на 90° от фазы ВЧ заполнения радиоимпульсов ведомой станции.
Таким образом, непрерывное колебание на выходе фазовращателя будет запоминать фазу ВЧ заполнения сигналов ведомой станции, т.е. jф = jВ + 90°.
Как видно из блок-схемы, при этом ФВ2 покажет разность фаз Dj = jВ – jА между ВЧ заполнениями радиоимпульсов ведущей и ведомой станций. Фазовый отсчет индицируется на части барабанного счетчика, обозначенной на блок-схеме словом «Точно». Фазовый отсчет определяется в пределах периода ВЧ заполнения, равного 10 мкс.
После отработки Фв2 опорное колебание на СД будет совпадать по фазе с ВЧ заполнением радиоимпульсов ведомой станции. На выходе СД будут появляться видеоимпульсы, повторяющие огибающую U ( t – tB ) радиоимпульсов ведомых станций. Эти видеоимпульсы, аналогично сигналам ведущей станции, поступают на схему формирования напряжения с одной переменной знака в особой точке в пределах фронта радиоимпульсов и затем на ВР. Опорные стробы наВР2 теперь поступают с выхода схемы управляемой задержки.
Схема управляемой задержки позволяет получить измерительные стробы, задержанные относительно измерительных стробов ведущей станции. Величина задержки может изменяться. Существует несколько разновидностей схем управляемой задержки. Варианты таких схем рассматривались б первом разделе.
Если измерительные стробы ведомого канала не совпадают с особыми точками огибающих сигналов ведомых станций, то появляющийся на выходе ВР2 сигнал рассогласования изменит управляемую задержку до необходимого значения. Временное положение t спз опорных стробов на выходе схемы переменной задержки будет совпадать с особой точкой сигналов ведомой станции, т.е. tспз = tB + t 0 .
Отсчетное устройство схемы переменной задержки укажет значение промежутка Dtмежду моментами появления стробов с выхода ДЧ и стробов с выхода схемы переменной задержки Dt = t спз – t дч = t В –tA . Отсчет по огибающей индицируется на части барабанного счетчика, обозначенной на блок-схеме словом «Грубо».
Счетчик имеет декадную оцифровку, причем каждая единица крайнего правого барабана счетчика огибающей соответствует десяти микросекундам. Обе части барабанного счетчика дают единый однозначный отсчет разности запаздывания поверхностных сигналов ведомой станции по отношению к сигналам ведущей станции. Однозначность фазовых измерений в импульсно-фазовой системе обеспечивается, если ошибка отсчетов огибающей не будет превышать половины периода Т высокочастотного заполнения, т.е. Dt0 < T1 /2= 5 мкс.