Курсовая работа: Разработка цифрового спидометра для ГИБДД
В передвижном варианте радара особых требований к рабочему температурному режиму не предъявляется, т. к. микропроцессорная часть проектируемого устройства размещается внутри салона автомобиля, снабжённого отопительной установкой. В стационарном варианте необходимо обеспечить температурный режим, не нарушающий работоспособность микропроцессорной системы.
Предполагаемое конструктивное исполнение проектируемого устройство - отдельное изделие.
2. Разработка функциональной схемы устройства
3.1 Радиолокационная установка (РЛУ)
Радиолокационные приборы излучатель и приёмник могут быть устроены по супергетеродинной схеме, основанной на двухканальном, амплитудно-импульсном методе, так, как показано на рисунке 3.1. На этом рисунке приведён пример доплеровской радиолокационной установки с непрерывным излучением.
Эхо сигнал от движущейся цели принимается приемниками канала 1 и канала 2. После преобразования в первом канале первичная частота:
fпч = fпр ± Fd1, соответственно во втором канале fпч = fпр ± Fd2, где Fd1 и Fd2 – доплеровские добавки, а fпр – первоначальная частота, задающаяся гетеродинами 1 и 2 каналов.
 |
??????? ? ??????? ??????? ???????????? ? ?????????, ??? ?????????? ??????? ?????? F? = F??? = Fd1 ? Fd2. ?????????????:
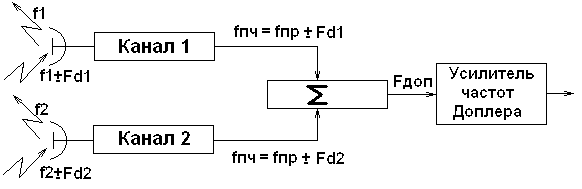 |
??????? 3.1 - ?????????????? ????? ???????????????? ?????????
, где с – скорость света.
Рассмотрим подробную работу схемы РЛУ.
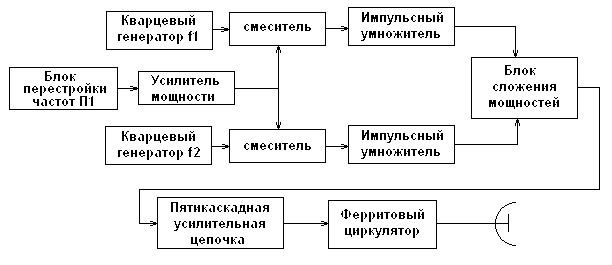
Рисунок 3.2. – Тракт зондирующего импульса
Тракт зондирующего импульса рис 3.2 предназначен для формирования высокочастотных зондирующих импульсов из маломощного непрерывного сигнала. Непрерывный сигнал с кварцевого генератора блока перестройки частот П1 усиливается усилителем мощности (в блоке П1 задается частота fзад). В смесителях происходит сложение несущей частоты f1 в первом канале и f2 во втором канале с частотой fзад. Затем образованные частоты складываются в блоке сложения мощностей для последующего усиления в пятикаскадной усилительной цепочке. Ферритовый циркулятор служит для переключения РЛУ с приема на передачу и обратно.
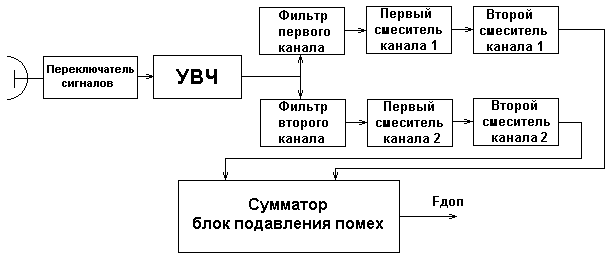 |
??????? 3.3. ? ????? ??? ???????
Тракт эхо сигнала (сигнала поступающего от движущегося автомобиля) рис 3.3. выполнен по супергетеродинной схеме с двойным преобразованием частоты. Отраженные от автомобиля сигналы f1 ± Fd1 и f2 ± Fd2 поступают на фильтры первого и второго каналов через переключатель сигналов и усилитель высоких частот. В этих фильтрах происходит разделение сигнала на два канала, после этого в первых смесителях под действием частоты fзад выделяются промежуточные частоты fпр. Дальше эхо сигнал поступает на вторые смесители где формируется оптимальная ширина пропускания. В сумматоре происходит совмещение двух импульсов и компенсация помех. На выходе сумматора имеем сигнал с частотой Доплера Fдоп.
Данная схема РЛУ свободна от таких недостатков как малочувствительность, потому что в ней отсутствуют тепловые и дробовые шумы, а так же мерцательные шумы, вносимые полупроводниковыми и электронными приборами. Мощность мерцательных шумов обратно пропорциональна частоте, и именно на низких доплеровских частотах шумы кристаллического смесителя могут значительно снизить чувствительность приёмника.
3.2 Микропроцессорная часть
Устройство можно спроектировать с применением однокристального микроконтроллера семейства МК48. Микросхемы семейств МК48 и МК51 получили наибольшее распространение среди микросхем такого класса. Использование микросхемы DD3 К1830ВЕ35 в данном случае - самый экономичный вариант реализации устройства. Функциональная схема устройства изображена на рисунке 3.4. Прикладную программу можно разместить во внешней памяти программ - микросхеме DD9 ПЗУ К556РТ5. Адрес очередной ячейки ПЗУ фиксируется во внешнем регистре DD4. Микроконтроллер содержит на кристалле три 8-разрядных порта. Линии порта P1 и линии P2.4-P2.7 используются для трёхразрядной индикации скорости (км/ч). Для индикации можно использовать тройку светодиодных семисегментных цифровых индикаторов HG1..HG3, например, типа АЛС324А. Индикаторы подключаются к портам микроконтроллера через дешифраторы DD6..DD8 (514ИД1), преобразующие двоично-десятичное содержимое портов в коды управления цифровыми индикаторами.
В данном варианте решения предполагается использование расширителя ввода/вывода DD5 - микросхемы К580ВР43. Расширитель ввода/вывода обеспечивает подключение четырёх дополнительных четырёхразрядных портов P4-P7. Порты P4, P5, P6 используются для ввода в микроконтроллер инверсного двоично-десятичного кода максимально допустимой скорости на данном участке дороги, для этого к ним подключаются три программных переключателя SA1..SA3 типа ПП10-ХВ, на лимбах которых и задаётся максимальная скорость. Линия 0 порта P7 используется для подачи управляющего импульса на аппаратуру фотосъёмки, которая запускается при появлении на линии P7.0 нулевого уровня.
У микроконтроллера задействованы входы T0 и T1. Со входом Т1 связан фотодатчик. Фотоэлемент формирует на входе T1 импульс с нулевым уровнем в тот момент, когда автомобиль проезжает мимо него, это используется для того, чтобы сделать фотоснимок автомобиля именно в нужный момент, если водитель превысил максимально допустимую скорость.
На вход микроконтроллера T0 поступают импульсы с уровнями ТТЛ с частотой Доплера. Для согласования сигнала с приёмного устройства радиолокационного прибора со входом T0 микроконтроллера используется цепочка, состоящая из триггера Шмита DD1 и счётного триггера DD2. Амплитуда напряжения синусоидальной формы с частотой Доплера на выходе усилителя приёмного устройства радиолокационного прибора достигает уровня, достаточного для срабатывания триггера Шмита. Счётный триггер формирует сигнал на тестируемом входе микроконтроллера.
4 Обоснование алгоритма работы устройства
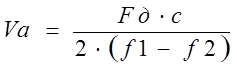
Так как измерение скорости основано на эффекте Доплера, необходимо связать доплеровский сдвиг частоты отражённого сигнала со скоростью автомобиля (в м/с):
для перевода скорости в км/ч умножим её на 3.6:
 (1)
(1)
Несущие частоты излучателей f1 и f2 выбираем равными 200 МГц и 100 МГц соответственно. Подставив в выражение (1) значение скорости света ![]() м/с и несущие частоты f1 и f2, получим:
м/с и несущие частоты f1 и f2, получим: ![]() . Частоту Доплера будем измерять методом подсчёта числа импульсов N генератора тактовых импульсов с периодом следования t :
. Частоту Доплера будем измерять методом подсчёта числа импульсов N генератора тактовых импульсов с периодом следования t :

таким образом, искомая скорость автомобиля в км/ч: 
Выбираем t = 0.27 мс, тогда ![]() . Для работы с целыми числами сначала вычислим
. Для работы с целыми числами сначала вычислим ![]() , а затем отбросим младшую цифру, при этом добавлением 5 производится округление.
, а затем отбросим младшую цифру, при этом добавлением 5 производится округление.
Для скорости автомобиля от 11 до 216 км/ч (3 ... 60 м/с), число N будет находиться в диапазоне от 1851 до 92.
Возвращаясь к функциональной схеме, нулевой уровень будем использовать для измерения частоты Доплера Fд, а при единичном - будем производить вычисление скорости Va и вывод её значения на индикаторы. Далее нужно производить контроль измеренной скорости автомобиля и передавать управление фотосъёмочной аппаратуре, если водитель автомобиля нарушил правила дорожного движения, превысив скорость. При этом фотоснимок будет сделан в тот момент, когда фотодатчик сформирует сигнал на входе T1. Активным является нулевой его уровень, коммутируемый на линию P7.0 для срабатывания фотоаппарата.
5 Разработка управляющей программы
5.1 Схема алгоритма
Схема алгоритма работы управляющей программы изображена на рисунке 5.1. После подачи сигнала сброса SR производится настройка портов P1 и P2 на вывод информации, осуществляется загрузка регистров R1-R0 первого банка регистров общего назначения микроконтроллера (РОН) инверсным двоично-десятичным числом максимально допустимой скорости, набранным на портах P6,P5,P4. После сброса на линии P7.0 (фотосъёмка) окажется неактивный единичный уровень.

Рисунок 5.1 - Схема алгоритма управляющей программы
Затем микроконтроллер переходит в состояние ожидания импульса на своём входе T0 (см. рисунок 5.1). После его появления осуществляется подготовка РОНов используемого нулевого банка. Далее, дождавшись нулевого уровня импульса, микроконтроллер осуществляет измерение Fдоп , то есть определение числа импульсов “генератора” тактовых импульсов с фиксированным периодом следования. ”Генератор” тактов основан на использовании временной задержки на время t = 0.27 мс. Подсчёт количества таких импульсов проводится в течении всей длительности нулевого уровня T0. Далее, в соответствии с подсчитанным числом N определяется скорость, при этом деление выполняется методом подсчёта количества сложений числа N до превышения суммой (S) числа ![]() . Затем найденная скорость выводится на индикаторы.
. Затем найденная скорость выводится на индикаторы.
Вычисленная на предыдущем этапе работы программы скорость сравнивается с максимально допустимой скоростью. В случае превышения скорости микроконтроллер ждёт появления на входе T1 импульса (нулевого уровня при срабатывании фотодатчика) и коммутирует его на линию P7.0, при этом производится фотосъёмка автомашины.
Если скорость не превышена (или после фотосъёмки), работа программы повторяется с момента ожидания микроконтроллером импульсов на входе T0.
5.2 Пояснения к программе
Листинг управляющей программы приведён в приложении А. Программа организована в виде нескольких подпрограмм как законченных функциональных модулей, это существенно улучшает восприятие текста программы при чтении. Основная программа осуществляет инициализацию, подготовку РОНов, вывод скорости в порты P4,P5,P6 для индикации, сравнение найденной скорости с максимальной путём побайтного сложения значения скорости с инверсным значением максимальной скорости и отслеживания признака переноса. Подпрограмма N осуществляет подсчёт числа N по нулевому уровню. Подпрограмма Y подсчитывает по заданному N число Y на протяжении единичного уровня импульса. Подпрограмме PHOTO передаётся управление, если полученная скорость больше максимально допустимой. Все вычисления производятся с использованием двоично-десятичного представления N(R1,R0) и Y(R6,R5). При этом переменные N и Y имеют двухбайтовый формат, то есть хранятся в двух РОНах. Накопитель S, использующийся при выполнении операции деления, имеет трёхбайтовый формат и хранится в РОНах R4,R3,R2. Сложение числа N в накопителе идёт до тех пор, пока в пятом бите старшего регистра S (R4) не появится 1, что соответствует числу ![]() (если все остальные биты - 0).
(если все остальные биты - 0).
Определим значение константы Z, которая загружается в регистр R7 для реализации фиксированной временной задержки t = 0.27 мс: ![]() мс,
мс,