Курсовая работа: Устройство управления системой измерения веса
Схема сброса должна формировать импульс логического нуля для подачи его на инверсный вывод сброса микроконтроллера RESET. Это импульс должен формироваться, например, при нажатии на кнопку сброса устройства или при переключении ключа.
Для такой схемы подходит включение транзистора, показанное на рисунке 2.2. Когда ключ открыт, транзистор находится в закрытом состоянии и на вход RESETAVR поступает сигнал логической единицы. Когда ключ замыкается, транзистор открывается и на вход сброса устройства поступает сигнал логического нуля.
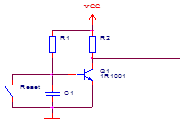
Рис. 2.3 – Схема формирования импульса сброса
2.4 Схема стабилизатора напряжения
В качестве стабилизатора напряжения в нашем устройстве используется импульсный понижающий стабилизатор LM2574, который обладает следующими характеристиками:
• входное напряжение - до 60 V (для HV версий)
• выходное напряжение - 3.3 V, 5 V, 12 V, 15V
• выходной ток - 0.5 А
Схема включения стабилизатора для преобразования +10 V - +5 V приведена на рисунке 2.4.
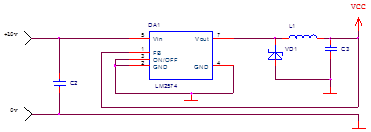
Рис. 2.4 - Схема включения стабилизатора напряжения LM2574
2.5 Входные и выходные устройства
Входными устройствами в данном проекте являются весовой индикатор WE2108, который имеет вывод превышения заданного уровня срабатывания и датчики положения заслонки бункера (открыт/закрыт). На выводе превышения заданного уровня срабатывания формируется уровень лог. 0, когда превышен заданный вес, предварительно занесенный в память прибора WE2108.
Весовой индикатор WE2108 является измерительным усилителем для подключения 4х датчиков веса. Сигнал датчиков веса усиливается и преобразуется прибором в цифровую форму и отображается на встроенном дисплее. WE2108 является полностью самостоятельным устройством со встроенным микропроцессором и позволяет выполнять широкий спектр задач связанных с измерением веса. Допустимое напряжение питания для прибора составляет от +10В до +35В постоянного тока.
Выходные устройства – сигналы управления задвижками бункера и транспортером выдаваемые через порты микроконтроллера ATmega16. Также предусмотрена индикация количества отгрузок на 4х разрядном 7-ми сегментном индикаторе.
3. Разработка программного обеспечения микроконтроллера
3.1 Разработка алгоритма программы
Программа должна выполнять следующие функции:
• обработка нажатия кнопки Пуск;
• управление заслонками бункера и работой транспортера;
• обработку сигнала превышения заданного веса;
• выдачу количества отгрузок на 4х разрядный 7-ми сегментный индикатор.
Выполнение этих операций происходит по следующему алгоритму:
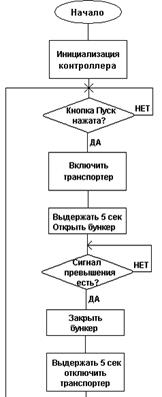

Рис. 3.1 – Алгоритм программы.
3.2 Проектирование функций микроконтроллера
Процедура инициализации микроконтроллера должна состоять из процедур или операторов инициализации всех узлов самого микроконтроллера и всех периферийных устройств, и установить все начальные значения для их регистров..