Реферат: Микропроцессорные системы управления АМТС
Особо перспективным является применение в системах управления агрегатами автомобилей однокристальных ЭВМ. В состав такой ЭВМ, выполненной в виде одной интегральной схемы, входят центральный процессор, генератор тактовых импульсов, ОЗУ, интерфейс ввода-вывода, таймер, контроллер прерываний, а также какое-либо из постоянных запоминающих устройств (ПЗУ, ППЗУ или РПЗУ с ультрафиолетовой системой стирания программы). Часто в составе одной серии однокристальных ЭВМ выпускают модификации с различными вариантами ПЗУ. Основным преимуществом применения однокристальной ЭВМ является возможность значительного сокращения числа интегральных микросхем, образующих систему управления. Однокристальная ЭВМ в зависимости от структуры микропроцессорной системы управления может заменить 5 — 10 корпусов интегральных микросхем, что помимо уменьшения размеров аппаратуры управления обеспечивает и существенное повышение ее надежности в результате сокращения внешних соединений между корпусами микросхем.
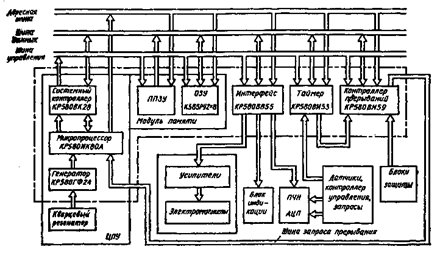
Рисунок 1. Структурная схема микропроцессорной системы автоматического управления переключением передач (на базе комплекта микросхем серии КР580)
На рисунке 1, приведена структурная схема системы автоматического управления переключением передач, основанная на применении микросхем, входящих в состав микропроцессорного комплекта серии КР580.На вход системы подаются сигналы от датчиков скорости автомобиля и частоты вращения коленчатого вала двигателя, температуры двигателя, загрузки автомобиля и др., а также команды, поступающие от аппаратуры управления, на которые воздействует водитель (например, датчик положения педали управления подачей топлива, контроллер управления, запросы на индикацию состояния тех или иных устройств управления или показателей двигателя и коробки передач).
Перед поступлением в собственно микропроцессорную систему управления все эти сигналы обязательно преобразуются в числовой код с помощью соответствующих преобразователей (например, аналого-цифровых преобразователей, преобразователей частота — код и т. д.), входящих в состав блока ввода. Информация от блока ввода поступает в схему интерфейса. Причем в случае большого объема информации таких схем интерфейса может быть несколько.
ЦПУ рассматриваемой микропроцессорной системы состоит из трех микросхем. Большая интегральная схема микропроцессора типа КР580ИК80А обрабатывает всю информацию. Ее связь с шинами управления и данных осуществляется через системный контроллер — шинный формирователь, а формирование тактовых последовательностей импульсов, необходимых для работы БИС микропроцессора, происходит с помощью генератора, стабилизированного кварцевым резонатором. В зависимости от вырабатываемых ЦПУ сигнала на шине управления и кода на шине адреса в работу с ним включается то или иное устройство микропроцессорной системы. Например, когда ЦПУ выдает на шину адреса код, требуемый для активизации соответствующего канала интерфейса, а на шину управления подает сигнал ввода, информация от данного канала интерфейса поступает в ЦПУ для последующей обработки.
В случае необходимости аналогичным образом осуществляется подача команд на обмен информации между ЦПУ и другими элементами микропроцессорной системы. При этом для работы с запоминающими устройствами ЦПУ выдает на адресную шину адрес ячейки памяти, а на шину управления команду «чтение» или «запись».
Для функционирования системы автоматического управления переключением передачи необходимо предусмотреть быстрое изменение режимов работы системы в зависимости от некоторых факторов. К числу таких факторов можно, например, отнести отказы тех или иных датчиков, приводящие к созданию аварийной ситуации, наличие юза при торможении автомобиля, непредусмотренные изменения напряжения питания системы.
Для того чтобы микропроцессорная система оперативно реагировала на указанные отклонения от нормальной работы, в ней используется система прерываний, реализуемая с помощью контроллера прерываний. К каждому входу или к части входов контроллера прерываний подводятся сигналы от внешних устройств. При появлении на каком-либо из входов контроллера сигнала с уровнем, соответствующим состоянию «логической 1», он посылает по линии запроса в ЦПУ запрос на прерывание его работы по основной программе. В зависимости от того, на какой из входов контроллера поступает сигнал с уровнем, соответствующим «логической 1», контроллер подготавливает информацию ЦПУ о том, на какую из подпрограмм ему следует перейти. Если сигналы с уровнем, соответствующим «логической 1», будут поданы одновременно на несколько входов контроллера, то он подготавливает для ЦПУ информацию о переходе на подпрограмму, предусмотренную сигналом внешнего устройства с самым старшим приоритетом.
При поступлении запроса от контроллера на прерывание ЦПУ сначала заканчивает выполнение текущей команды, а затем выдает на управляющую шину сигнал разрешения прерывания, т. е. готовность перехода от основной программы к подпрограмме. После этого контроллер информирует ЦПУ, на какую из подпрограмм ему следует перейти. По окончании выполнения этой подпрограммы ЦПУ либо по сигналу контроллера прерывания переходит на новую подпрограмму, запрос на которую поступил к контроллеру от следующего по старшинству приоритета внешнего устройства, либо при отсутствии таких запросов возвращается к выполнению основной программы.
Выполнение ЦПУ подпрограмм в порядке, определяемом старшинством приоритета внешних устройств, обеспечивает первоочередную реализацию в системе управления переключением передач таких управляющих воздействий, которые являются наиболее важными для автомобиля. В частности, старшим приоритетом, как правило, обладают внешние устройства, сигнализирующие о неполадках в системе управления, могущих создать для автомобиля аварийную ситуацию.
Микросхема контроллера прерываний КР580ВН59 имеет восемь входов для подключения к внешним устройствам. К одному или нескольким из этих входов могут быть подключены выходы таймера. Если при этом к входам таймера подвести сигналы от датчиков скорости и частоты вращения, то такое схемное решение позволит исключить из состава системы управления частотно-аналоговые и аналого-цифровые преобразователи, поскольку выполняемые ими задачи могут быть решены совместным действием таймера и ЦПУ.
Таймер может быть также использован для создания программ микропроцессорных систем управления, устойчивых к сбоям под воздействием внешних помех. В этом случае таймер используется для периодического контроля состояния элементов микропроцессорных систем управления, которое зависит от того, правильно ли функционирует система или в ней имеют место сбои.
После того, как ЦПУ заканчивает обработку соответствующего объема информации, он выдает управляющую команду, которая далее через канал вывода интерфейса поступает к блоку усилителей питания электромагнитов исполнительных устройств, а также к блоку индикации режимов. В результате обеспечивается требуемый порядок срабатывания исполнительных устройств и получение индикации режимов их работы.
Если для управления переключением передач применить однокристальную ЭВМ, то по своим функциональным возможностям она будет эквивалентна микросхеме, очерченной на рисунке 1 штрих-пунктирной линией. В этом случае микропроцессорная система существенно упрощается. По техническим возможностям она практически не уступает системам, создаваемым с использованием нескольких микросхем, входящих в микропроцессорный комплект. В частности, если объем памяти однокристальной ЭВМ окажется недостаточным, то его можно увеличить, подключив ЭВМ к внешним устройствам.
Однокристальная ЭВМ содержит сотни тысяч элементов, и технология ее изготовления значительно сложнее по сравнению с изготовлением микросхем, входящих в микропроцессорный комплект. Вследствие этого стоимость однокристальной ЭВМ достаточно высока. Поэтому вопрос о целесообразности создания микропроцессорных систем управления на базе однокристальной ЭВМ следует решать с учетом конкретных областей применения той или иной системы управления.
По сравнению с электронными системами управления микропроцессорные системы имеют следующие преимущества:
с их помощью возможна реализация алгоритма управления любой сложности. При этом может быть учтено большое количество внешних параметров (помимо традиционно принимаемых во внимание частот вращения вала двигателя, выходного вала трансмиссии и нагрузки двигателя) таких, например, как производные этих параметров по времени, температурный режим двигателя, температура масла, полная масса автомобиля и т. д. Возникающие при этом трудности связаны лишь с необходимостью введения дополнительных датчиков и преобразователей;
при необходимости обеспечивается корректирование алгоритма управления как при развитии системы, так и в рамках существующей системы с учетом, например, таких факторов, как изменение характеристик агрегатов вследствие их изнашивания. Следовательно, возможно создание адаптивных систем управления, которые способны изменять свои характеристики в процессе эксплуатации автомобиля с целью обеспечения его наилучших показателей. Для достижения такого эффекта не требуется изменения аппаратурной части системы;
вследствие реализации широких возможностей микропроцессорных систем возможно создание комплексной системы управления агрегатами автомобиля (например, двигателем, сцеплением, коробкой передач);
система управления на базе микропроцессорного комплекта или однокристальной ЭВМ требует минимального объема настройки и регулировок, поскольку они необходимы только для таких вспомогательных элементов системы, как ПЧН, ЦАП и АЦП.
Основными недостатками микропроцессорных систем являются:
относительно высокая стоимость системы вследствие необходимости ее комплектования рядом вспомогательных элементов, из числа которых наиболее дорогостоящими являются устройства ввода-вывода информации. Кроме того, значительная часть расходов по созданию микропроцессорных систем управления приходится на разработку их математического обеспечения;
чувствительность к помехам, которые могут вызывать сбои в работе системы. Это особенно важно для автомобильных микропроцессорных систем управления, поскольку работа агрегатов автомобиля сопровождается значительными помехами в его бортовой сети, а также полевыми (электромагнитными) помехами. Для устранения этого недостатка в настоящее время большое внимание уделяется разработке помехоустойчивых алгоритмов, т. е. таких, которые способны восстанавливать свою работу после непредвиденных сбоев.
Непрерывное совершенствование технологии производства электронных приборов, в том числе элементов микропроцессорных систем управления, обусловливает снижение их стоимости и создает благоприятные предпосылки для расширения их применения. Однако микропроцессорные системы целесообразно использовать в первую очередь для систем управления агрегатами автомобиля со сложными алгоритмами. К таким системам следует отнести антиблокировочные системы управления тормозными механизмами, системы управления гидромеханическими и автоматизированными механическими передачами и, конечно, комплексные системы управления несколькими агрегатами.
Одной из основных проблем создания микропроцессорных систем является разработка и реализация оптимального алгоритма управления. Многие различные микропроцессорные системы отличаются одна от другой в основном составом датчиков и видом алгоритма функционирования, который зависит от целевого назначения системы и сложности решаемых ею задач.
Рассмотрим микропроцессорную систему, разработанную для легкового автомобиля «Фиат — Панда 30». Исполнительным механизмом системы (рисунок 2) является вакуумная сервокамера 20, шток 21 которой через рычаг 22 воздействует на выжимной подшипник 4 сцепления 5. Источником разрежения для вакуумной сервокамеры является впускной коллектор 7 двигателя, соединенный через обратный клапан 13 с вакуумным ресивером 14.
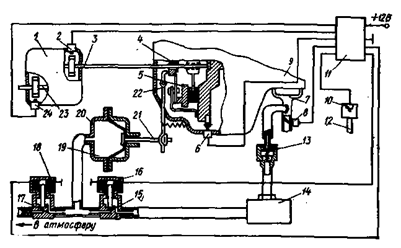
Рисунок 2. Схема размещения элементов микропроцессорной системы управления сцеплением: