Реферат: Развитие теоретических принципов технической диагностики
В диагностике технических систем нередко проявляются дефекты, при которых связь между признаками и причинами неисправностей носит неоднозначный характер. Простые двузначные утверждения типа “исправный – 1” / “неисправный – 0” недостаточны, поскольку четкие правила поиска неисправностей в системе основываются на взаимнооднозначном соответствии между причиной и признаками неисправностей, то есть они жестко детерминированы в правилах. Современные диагностические системы должны распознавать опасные условия функционирования, причины и тип возникшей неисправности. Помимо этого ожидается также информация об оценке оставшегося срока службы всей технической системы или ее составной части.
Таким образом, выходные параметры диагностической системы должны определять с одной стороны причину и тип дефекта (неисправности), с другой стороны - состояние объекта диагностирования, его соответствие оперативно-функциональному назначению.
Аналитические модели диагностики отказов определяют, выделяют и классифицируют отказы в компонентах системы. Рисунок 1 демонстрирует структуру аналитической модели диагностики отказов, состоящую из двух основных частей.
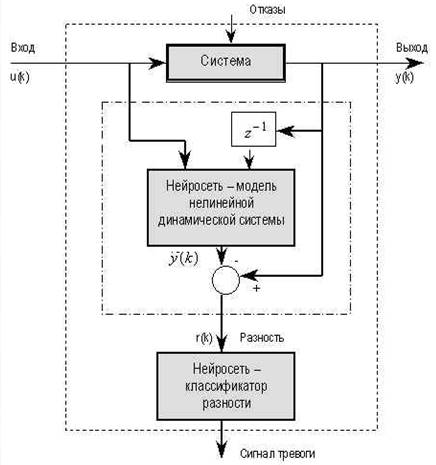
Рисунок 1. Концептуальная структура аналитической модели диагностики отказов
Первая часть модели представляет собой определитель разности, который обрабатывает входы и выходы системы в соответствии с определенным алгоритмом. На его выходе формируются сигналы разности. Разность должна быть отличной от нуля в случае отказа и равна нулю, если отказа нет.
Второй частью модели является классификатор отказов, в котором разности оцениваются на наличие в системе отказа и по определенному правилу принимается решение о выходе системы из строя. Процесс принятия решения может состоять из простой проверки превышения полученной разности максимально допустимого значения, или же использовать более сложные методы статистических оценок. [6]
Основной проблемой разработки аналитических моделей диагностики отказов является определение разности. Большинство определителей разности основаны на моделях линейных систем. Для нелинейных систем основным подходом является их линеаризация. Однако, для систем с высокой степенью нелинейности и большим количеством нелинейных операций, такая линеаризация не дает удовлетворительных результатов.
Единственным решением данной проблемы является использование большого количества линейных систем, что не очень практично при создании моделей, работающих в реальном времени. Большинство известных линеаризацией применимы лишь для ограниченного класса нелинейностей. К тому же, процесс создания моделей очень сложен и точность получаемых результатов трудно проверить.
Зная возможности нейронных сетей моделировать сложные системы обладая небольшим количеством информации, можно сделать вывод о том, что проблемы такого характера можно решить полностью, если использовать в аналитических моделях нейронные сети.
Следующая ступень обработки - классификация разностей и определение возможного отказа. Главной задачей здесь является правильное отделение нормальных разностей от разностей, содержащих данные об отказе. В присутствии в системе шумов и неопределенностей эта задача может оказаться трудной. Для выделения отказа разность должна быть обработана таким образом, чтобы стало понятно, какой компонент системы вышел из строя. Обработка одного сигнала разности не представляет особой трудности, однако, вектор разностей усложняет процесс определения отказа. Основным подходом определения отказа является создание набора структурированных разностных сигналов. То есть, в этом случае, каждая разность является чувствительной к одной определенной группе отказов и нечувствительной ко всем остальным. Однако, создание такого набора разностей для нелинейных систем является сложной задачей. Даже для линейных систем отношения между отказами и разностями могут быть нелинейными для параметрических отказов.
Все это приводит к решению использовать нейронные сети для выделения отказов, так как нейронные сети могут быть натренированы определенным образом с целью получения соответствующей связи между входами и выходами.
Д. Баршдорф в работе пишет, что важным шагом в любом методе диагностики отказов является построение математической модели, дающей адекватную информацию о функционировании системы. Диагностирование неисправностей системы при помощи детерминистических методов распознавания дефектов эффективно при наличии математической модели ее функционирования. Эти модели в большинстве случаев можно анализировать лишь численными методами, что накладывает ограничение на их использование в реальном времени при поиске неисправностей и управлении технической системой. Почти все реальные процессы функционирования технических систем имеют нелинейное поведение, для них характерно возникновение нештатных ситуаций. В этих случаях обычно используют экспертов, то есть происходит вмешательство человека в процесс диагностирования и управления технической системой. Если детерминистические знания недоступны или математическое моделирование требует больших затрат расчетного времени, либо не обеспечивает требуемой точности, то могут быть использованы другие методы. Такими методами являются моделирование знаний оператора при помощи эвристических познаний и стратегий логического вывода, как например, это делается в экспертных системах на основе нечетких логик с реализацией их на базе аппаратных или программно-алгоритмических эмуляционных нейронных сетей. [1]
Нейронные сети оказались полезными как средство контроля механизмов. Например, нейронная сеть может быть обучена так, чтобы отличить звук, который издает машин при нормальной работе («ложная тревога») от того, который является предвестником неполадок.
Одним из наиболее важных преимуществ нейронных сетей является их способность представлять нелинейные преобразования, таким образом, нейронные сети способны формировать очень точную аппроксимацию для нелинейных функций любой продолжительности.
Нейронные сети являются альтернативным вариантом проектирования оценочных устройств. Важным свойством нейронных сетей является то, что они изучают динамику системы в процессе тренировки, состоящей из нескольких тренировочных циклов, с тренировочным данными, поступающими либо из предыдущего цикла, либо состоящей из реальных сигналов. После каждого цикла нейронная сеть узнает все больше и больше о динамике объекта. Одним из наиболее важных качеств нейронных сетей является их возможность изучать динамику поведения нелинейных систем автоматически, в случае, если архитектура нейронной сети содержит как минимум три слоя. [10]
Преимущества классификатора, построенного на основе нейросетей, перед традиционными оценочными методами заключается в таких факторах: независимость от шумов, самообучаемость, возможность параллельной обработки и т.д.
Обученная нейронная сеть, на основе мониторинга окружающих условий по радиационному фону, может с высокой степенью точности предсказать появление дефектов в полупроводниковых приборах и оценить степень их живучести, то есть своевременно вывести технический объект (робота) из зоны опасного воздействия радиации для его ремонта.
Заключение
Меньше чем за 40 лет в рамках дисциплины технической диагностики было решено много практических задач и достигнуто много существенных теоретических достижений. Но, несмотря на значительный прогресс в теории и практике автоматизации обнаружения основных дефектов машин и оборудования, оценка технического состояния промышленного оборудования на большинстве российских предприятий выполняется на основе субъективного метода оценки высококвалифицированными специалистами диагностами, обслуживающими объекты диагностирования на протяжении длительного времени и получивших опыт ориентирования во внешних признаках изменения технического состояния. Последние достижения науки предопределяют необходимость перехода от субъективных методов оценки состояния к объективным.
На данный момент перспективными направлениями развития методов и средств диагностики являются методы, основанные на нечеткой логике или нечетких множествах, экспертные системы и нейронные сети. Методы нечеткой логики позволяют значительно упростить описание модели объектов контроля и диагностики, а также являются более простыми для аппаратной реализации. Экспертные системы позволяют принимать решения о состоянии объекта контроля, если оценка состояния или поиска неисправности объекта контроля является трудно формализуемой задачей. Нейронные сети используют для идентификации объектов контроля, распознавания образов и прогнозирования состояния технической системы.
Литература
1. Баршдорф Д. Нейронные сети и нечеткая логика. Новые концепции для технической диагностики неисправностей. //Приборы и системы управления. 1996. №2.
2. Беляков В.В., Бушуева М.Е., Сагунов В.И. Многокритериальная оптимизация в задачах оценки подвижности, конкурентоспособности автотракторной техники и диагностики сложных технических систем. –Н.Новгород: НГТУ, 2001, 271 с.
3. Биргер И.А. Техническая диагностика.-М.: Машиностроение, 1978.
4. Бушуева М.Е. Методы и алгоритмы обеспечения контролепригодности сложных технических систем при кратных дефектах. Н.Новгород, 1997.
5. Бушуева М.Е., Беляков В.В. Диагностика сложных технических систем / Разработка радиационно стойких полупроводниковых приборов для систем связи и прецизионных измерений с использованием шумового анализа //Труды 1-го ра-бочего совещания по проекту НАТО SfP–973799 Semiconductors –Н.Новгород: ТАЛАМ, 2001, с.63–98.
6. Круглов В.В., Борисов В.В. Искусственные нейронные сети. Теория и практика. –М.: Горячая линия. Телеком, 2001, 382 с.
7. Розенблатт Ф. Проблема внедрения самообучающихся информационных
систем для оценки качества изготовления и
функционирования машин и оборудования. Санкт-Петербург – 2004.
8. Селлерс Ф. Методы обнаружения ошибок в работе ЭЦВМ, пер. с англ., М., 1972;
9. Субботин С. А. Синтез вейвлет-нейро-нечетких моделей для диагностики деталей авиадвигателей. ОАО "Мотор-Сич", 2003
10. Шахов А.В., Власов А.И., Кузнецов А.С., Поляков Ю.А. Нейрокомпьютеры: архитектура и реализация. //Приложение к журналу “Информационные технологии”. 2000. №9