Реферат: Розробка схеми приймача цифрової тропосферної станції
Рис. 6. Послідовне наближення
Для кращого розуміння роботи АЦП послідовного наближення доцільно зобразити блок-схему алгоритму процесу послідовного наближення за допомогою «логічного аналізатора» і «осцилографа», що і зображено на рис. 7.
Якщо розглядати програмну реалізацію, то функцію регістра послідовного наближення може виконувати комп’ютер при організації відповідних апаратних зв’язків, що має суттєве значення при практичній реалізації розробленого приймача, а також повинно враховуватися при розробці спеціалізованої ЕОМ і програмного забезпечення для її функціонування. На думку провідних вчених в даній галузі, досить легко створити таку систему, яка б працювала як ЦАП або як АЦП послідовного наближення в залежності від програмного управління [10].
Отже розглянуті вище схеми АЦП мають ряд недоліків і переваг в кожній з них. АЦП паралельного типу має дуже високу швидкодію, що дуже важливо враховуючи те, що процес перетворення сигналу з аналогового в цифровий вид необхідно проводити на частоті 70 МГц, а в перспективі на робочій частоті станції, що досить суттєво зменшить вартість і масо-габаритні показники приймача та підвищить відношення сигнал/шум за рахунок відсутності блоку ПЧ. АЦП паралельного типу має відносно низький рівень точності процесу перетворення, що не можливо не враховувати.
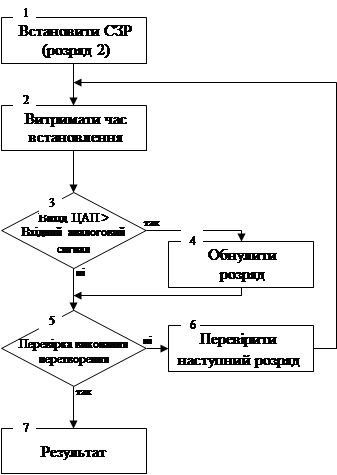 |
Рис. 7. Спрощений алгоритм послідовного наближення
Проаналізувавши дві схеми АЦП, доцільно висунути ряд вимог до схеми АЦП, яку необхідно розробити для даного приймача, а саме:
- швидкодія процесу перетворення сигналу повинна бути дуже високою, порядку сотні МГц, з перспективою переходу на робочу частоту станції;
- процес перетворення сигналу повинен проходити з максимальною точністю;
- процес перетворення сигналу повинен контролюватися за допомогою спеціалізованої ЕОМ;
- схема АЦП повинна бути реалізована у вигляді мікросхеми, що значно зменшить її масо-габаритні показники;
- важливою вимогою до АЦП є його вартість, адже враховуючи велику кількість АЦП в одному приймачі, їх ціна повинна бути низькою.
Варіанти антенних пристроїв тропосферної станції
Доцільним буде розглянути такий важливий елемент, розробленого приймача, як антенний пристрій. В розробленому приймачі велика увага приділяється саме антенному пристрою в зв’язку з тим, що саме він визначає параметри приймача в цілому.
Розробка структурної схеми приймального тракту для систем тропосферного зв’язку має на меті модернізацію його основних складових на основі сучасних досягнень радіоелектроніки. В даній роботі запропонована розробка приймальної антени, як складової приймального тракту, на основі використання цифрових антенних решіток, а також, як варіант обробки сигналів в антенних решітках запропоновано метод максимальної правдоподібності.
В багатьох практичних задачах радіолокації, радіонавігації, радіозв’язку необхідно знати кутові координати джерел випромінювань, що одночасно формують сигнали з однаковими несучими частотами. До подібних сигналів відносяться навмисні перешкоди, що створюються противником із різних точок простору працюючим радіоелектронним засобам, а також природні завади, котрі обумовлені особливостями розповсюдження сигналів в навколоземному просторі, що призводить до багатопроменевості в точці прийому.
Як показує аналіз [6], системи обробки сигналів на фоні неізотропних за простором (локальних) завад доцільно будувати на базі антенних решіток по схемі з компенсацією завад на виходах зформованих допоміжних просторових сигналів. Останні забезпечують оптимальне виділення локальних завад на фоні внутрішніх шумів і мають такі ж діаграми направленості, як і сигнальний (основний) канал. Для формування допоміжних каналів у складі РЕЗ необхідно мати спеціальний пристрій оцінки числа і кутових параметрів ДВ, алгоритм функціонування якого можуть бути засновані на спектральних методах оцінки. Відомо [8], що спектральні методи оцінки на основі даних вимірів, що отримані за допомогою АР, дозволяють зформувати максимально достовірні оцінки кутових координат ДВ. Задача визначення напрямку ДВ за допомогою АР еквівалентна задачі оцінки спектру сигналу [5]. Алгебраїчний підхід до обробки сигналів в АР дозволяє створювати все нові алгоритми спектральної оцінки. На сьогодні відома досить велика кількість вказаних методів.
Одним з найбільш відомих алгоритмів обробки сигналів в АР, що володіє достатньо високою вирішуючою здатністю, являється метод максимальної правдоподібності. Цей алгоритм вперше був запропонований Кейпоном [7]. Відповідна оцінка будується шляхом знаходження вектора пеленгаційного (опорного) напрямку А , при введені якого результуючий сигнал ![]() має максимальну потужність при обмеженні
має максимальну потужність при обмеженні ![]() , де F 0 – являє собою вектор, що характеризує ідеальну плоску хвилю, що розповсюджуються по лінії візирування. Зміст прийнятого обмеження заключається в тому, що для кожного напрямку спостереження рівень приймаємого сигналу під час обробки АР не змінювався.
, де F 0 – являє собою вектор, що характеризує ідеальну плоску хвилю, що розповсюджуються по лінії візирування. Зміст прийнятого обмеження заключається в тому, що для кожного напрямку спостереження рівень приймаємого сигналу під час обробки АР не змінювався.
Для знаходження комплексного вектора А мінімізується функція ![]() , де
, де ![]() – множник Лагранжа. В результаті рішення приймає вигляд [5]:
– множник Лагранжа. В результаті рішення приймає вигляд [5]:
![]() . ( 1)
. ( 1)
Потужність результуючого сигналу АР, що орієнтована в напрямку, котрий заданий вектором F 0 , описується виразом:
![]() . ( 2)
. ( 2)
Дж.Кейпон назвав ![]() оцінкою високого вирішення, так як описаний вище метод оцінки володіє досить високою вирішуючою здатністю. Спектральна оцінка за даним методом описує відносні компоненти спектру і не є оцінкою істинної спектральної щільності потужності [8]. Тому назва методу є не зовсім точною, так як даний метод не дає оцінку максимальної правдоподібності для функції спектральної щільності потужності. До переваг максимальної правдоподібності оцінки необхідно віднести те, що вона дає спектр, висоти піків в якому, прямо пропорційні потужності гармонік, котрі присутні в аналізуємому процесі.
оцінкою високого вирішення, так як описаний вище метод оцінки володіє досить високою вирішуючою здатністю. Спектральна оцінка за даним методом описує відносні компоненти спектру і не є оцінкою істинної спектральної щільності потужності [8]. Тому назва методу є не зовсім точною, так як даний метод не дає оцінку максимальної правдоподібності для функції спектральної щільності потужності. До переваг максимальної правдоподібності оцінки необхідно віднести те, що вона дає спектр, висоти піків в якому, прямо пропорційні потужності гармонік, котрі присутні в аналізуємому процесі.
Згідно виразу ( 2) процес визначення спектру складається з двох етапів.
На першому етапі по вхідним даним x обраховується матриця R .
На другому етапі задається деякий початковий опорний напрям r і, відповідно, початковий вектор F 0 , для якого розраховується значеня Р МП . Потім вводиться наступне значення опорного напрямку і розрахунок повторюється. Розрахунок проводиться у всьому допустимому діапазоні кутів візирування в окремих напрямках, що розміщенні досить близько. Оскільки метод МП відноситься до групи послідовних методів, далі відшукуються положення максимумів. За положенням останніх оцінюється кутові координати ДВ, а за їх кількістю – кількість ДВ. Поряд із алгоритмом ( 2) Кейпона для оцінки кутових координат ДВ можна застосувати статистики Кейпона:
![]() . ( 3)
. ( 3)
Необхідність використання статистики Кейпона виникає під час прийому негаусівських та нестаціонарних сигналів ДВ великої інтенсивності [8]. Необхідно зауважити, що в подібній ситуації кращі показики мають більш складні за розрахунком, але близькі за структурою алгоритми за статистиками «відношення Релея» і «теплового шуму», що мають відповідно вигляд:
![]() ; ( 4)
; ( 4)
![]() . ( 5)
. ( 5)