Реферат: Системы GPS-мониторинга транспорта
Рис. 3. Расположение спутников на информационном экране навигатора
Как видно из рисунка (снимок с экрана GPS-навигатора), спутников в пределах видимости находится девять. В реальности спутников на проекции
сферы видно не более восьми, а сигналы принимаются максимум с четырех-шести. Закрашенный столбик над номером спутника показывает на устойчивый прием сигналов, а высота столбца позволяет оценить качество приема. В момент, когда GPS-навигатор начинает получать информацию со спутника, над его номером появляется не закрашенный прямоугольник. Закрашивается он при уточнении параметров орбиты спутника и начале получения данных, на основе которых идет непосредственный расчет координат пользователя.
Данные спутниковых систем и параметры орбит спутников рассчитываются относительно центра масс Земли. В бытовых GPS-навигаторах используется единая система координат, наиболее популярная в системах гражданской авиации, WGS-84.
При наличии сигнала от одного спутника (№1), известной скорости распространения электромагнитного сигнала в пространстве (300 000 км/с) и времени, за которое сигнал дошел от спутника до GPS-приемника, стало возможным рассчитать геометрическое место точек нахождения приемника сигнала (им будет являться сфера с радиусом, равным расстоянию от спутника до приемника, в центре которой находится спутник).
Если GPS-навигатор начал принимать сигналы от второго спутника, то аналогично первому случаю, строится сфера вокруг спутника №2. Так как GPS-приемник должен находиться на обеих сферах сразу, то теперь строим пересечение двух сфер. Каждая точка получившейся окружности может являться местом нахождения приемника в пространстве.
Наконец, когда приемник поймает сигнал от спутника №3, строится еще одна сфера, при пересечении с окружностью она дает нам две точки. Одна из этих точек, как правило, имеет довольно неправдоподобное расположение, и в процессе вычисления по алгоритму она отбрасывается. Таким образом, мы получаем результат: широту и долготу.
Но если учитывать огромную скорость распространения электромагнитной волны, ошибка в расчетах на тысячные доли секунды может привести к довольно серьезным погрешностям в вычислении расстояния до спутника, а затем и в построении сфер и определении координат. Таким образом, мы подобрались к одному важному нюансу — для корректного определения координат необходим четвертый спутник.
После построения трех сфер приемник начинает манипулировать с временной задержкой. При каждом новом сдвиге времени приемника строятся новые сферы, точка пересечения их «расплывается» в треугольник. То есть сферы перестают пересекаться, а местоположение GPS-приемника может с определенной вероятностью быть в любой из точек треугольной области. Затем временные сдвиги продолжаются до тех пор, пока все три сферы снова не пересекутся в одной точке. Получаем довольно точные координаты. И чем больше спутников «видит» навигатор, тем точнее мы можем скорректировать время с вытекающим из этого увеличением точности позиционирования. При наличии четвертого спутника начинает работать так называемая 3D-навигация, и мы имеем возможность определить высоту над уровнем моря, скорость передвижения по поверхности и скорость вертикального перемещения.
Немного о точности. При создании системы в нее специально внесли так называемый режим S/A (Selective Availability — ограниченный доступ). Этот режим разработан для того, чтобы не дать возможному противнику тактического преимущества в определении местоположения с помощью GPS.
Принцип действия данного режима заключается в искусственном рассогласовании часов спутника и приемника. Поэтому даже при хорошем приеме сигналов нескольких спутников точность не превышала 100 метров.
Однако в 2000 году данный режим был отменен, и официально система GPS стала давать возможность определять координаты более точно. Как правило, указывают точность в 20…30 метров. Если использовать специальные алгоритмы пост-обработки, точность можно повысить вплоть до нескольких миллиметров, но это умеют делать геодезические системы. Для работы с такими системами нужен сертификат и разрешение, а их стоимость превышает стоимость бытовых навигаторов в десятки раз.
На точность определения координат существенное влияние оказывают ошибки, возникающие при выполнении процедуры измерений. Природа этих ошибок различна.
1. Неточное определение времени. Вносит погрешность порядка 1 метра.
2. Погрешности вычисления орбит спутников (уточнения эфемерид). Вносят погрешность порядка 1 метра.
3. Ионосферные задержки сигнала. Вносят погрешность до 10 метров.
4. Многолучевое отражение от высоких зданий, других объектов. Вносит погрешность до 2 метров.
5. Геометрическое расположение спутников.
6. Тропосферные задержки сигнала.
GPS технологии на транспорте
Большинство российских компаний, осуществляющих перевозки, рано или поздно сталкивается с проблемой злоупотреблений со стороны работников, непосредственно эксплуатирующих технику. Это и «сливы топлива», и «левые рейсы», и «приписка пробега». Все эти и многие другие проблемы (контроль передвижения транспорта в реальном времени, оптимизация транспортных схем, создание полной базы данных по работе автотранспорта) поможет решить система мониторинга на основе GPS.
Black_box и Black_box-GSM представляют собой функционально законченные устройства системы мониторинга мобильных объектов, способные решать различные задачи по управлению транспортом и другими мобильными объектами с помощью системы глобального позиционирования GPS.
Система Black_box
В основу этой системы положен принцип «черного ящика», который записывает различную информацию с датчиков транспортного средства, а также информацию о местонахождении объекта, получаемую со спутников с помощью GPS-модуля, установленного на борту транспортного средства.
Используемый в системе модуль GPS изготовлен на основе высокопроизводительного чипсета SiRFstarIII и может работать от отраженных сигналов (его 20-канальный приемник имеет очень хорошую чувствительность –158 дБм), что позволяет в некоторых случаях размещать GPS-антенну внутри транспортного средства). Модуль GPS имеет низкое энергопотребление — до 70 мА; время «горячего старта» — 1 с, время «холодного старта» — 45 с.
Black_box оснащен шестью аналоговыми входами с 10-разрядным АЦП с диапазоном измерения от 0 до 40 В с точностью измерения 0,05 В, а также шестью дискретными входами, двумя 16-разрядными счетчиками импульсов и двумя управляющими выходами, рассчитанными на ток до 300 мА. Широкий диапазон входных напряжений и высокая точность измерения позволяет подключать к Black_box как штатные датчики автомобиля (датчик уровня топлива, тахометр, давление масла двигателя, температура охлаждающей жидкости, включение зажигания), так и установленные дополнительно датчик расхода дизельного топлива и др.). Это позволяет реализовать любую задачу, связанную с управлением мобильных объектов, — от единичного автомобиля до парка в несколько сотен автомашин.
Black_box имеет встроенную защиту от перенапряжения и короткого замыкания, способен сохранять 180 000 записей с интервалом от 1 до 50 с.
При формировании пакета данных с интервалом 10 с емкость памяти устройства позволяет записывать данные в течение 20 суток, после полного заполнения памяти устройства новые данные записываются «по кругу», стирая наиболее старые. Наличие порта RS-232 позволяет существенно расширить его функциональные возможности, а также производить диагностику и настройку. Black_box имеет автономный источник питания — Li-on батарею емкостью 1,2 А·ч, которая позволяет системе автономно работать при потере бортового питания до 48 ч. Перенос информации с объектов наблюдения на компьютер диспетчера осуществляется вручную при помощи флэш-карты. Корпус устройства Black_box изготовлен из алюминия, имеет современный дизайн и отличается небольшими размерами. В комплект поставки входит: Black_box, внешняя GPS-антенна, комплект проводов (для подключения к системам автомобиля), удлинитель считывателя (при помощи которого данные переносятся на флэш-карту).
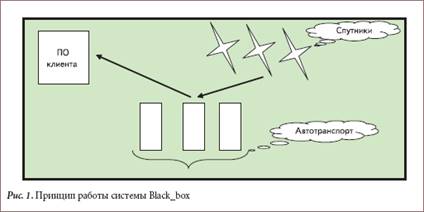
На рис. 4 схематически изображен принцип работы системы Black_box.