Реферат: Теория и практика пассивной пеленгации и ее нераскрытые возможности
∆n
∆t2 = ∆ Tm;
∆n
∆t3 = ∆T;
n∆
и альтернативные формулы: через пеленгационный угол движения (f1 , f2 ) и курсовые углы (a1 ,a2 ,a3 )
∆t1 = или
или
∆t1 = ![]() и т.д.
и т.д.
аналогично определяются Dt2 и Dt3
б) ![]() ;
; ![]() ;
;
и формула, для интереса, если известны моменты времени излучения сигналов (Тх , Тy , Т2 ,), то;

в) ![]() ;
; ![]() ;
;
![]() ;
;
и альтернативная формула, выраженная через коэффициенты m и n
![]() α2 =
α2 =
г) [Ty -Tx ] = [Tz -Ty ] = ![]()
д) 
и альтернативная формула
![]()
е) ответить на этот пункт вопросов не составляет большой сложности, когда известны вышеопределенные параметры.
Задача 2.
Объекты "А" и "В", (самолеты) движутся прямолинейно-равномерно в пл. "Q".
Объект "В" непрерывно излучает сигналы которые объект "А" улавливает и фиксирует в моменты времени Т1 , Т2 , Т3 в дискретном режиме, т. е
Т2 - Т1 =Т3 - Т2 = t (Ty- Tx¹ Т2 - Ty) (см. схем рис.2).
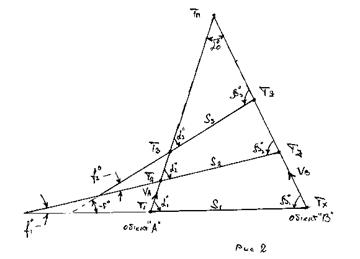
Рис. 2
По условию задачи известно:
отношение сигналов равно m и n, определенные аналогичным методом, как в выше приведенной задаче и заданы пеленгационые углы движения f1 и f2 . По этим параметрам (f1 , f2 , m, n, T1 , T2 , T3 ), требуется ответить на все пункты предыдущих вопросов задачи 1, кроме пункта б, и дополнительно определить: