Учебное пособие: Электропривод с шаговым двигателем
Рис. 2. Двигатель с переменным магнитным сопротивлением.
При включени тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Двигатель не чувствителен к направлению тока в обмотках. Реальный двигатель может иметь большее количество полюсов статора и большее количество зубцов ротора, что соответствует большему количеству шагов на оборот. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает очень маленькое значения угла шага, порядка нескольких градусов. Двигатели с переменным магнитным сопротивлением довольно редко используют в индустриальных применениях.
Двигатели с постоянными магнитами
Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты (рис. 3). Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
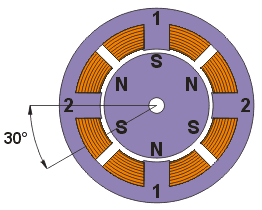
Рис. 3. Двигатель с постоянными магнитами.
Показанный на рисунке двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Двигатель имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель, как и рассмотренный ранее двигатель с переменным магнитным сопротивлением, имеет величину шага 30 град. При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48 – 24 шага на оборот (угол шага 7.5 – 15 град).
Разрез реального шагового двигателя с постоянными магнитами показан на рис. 4.
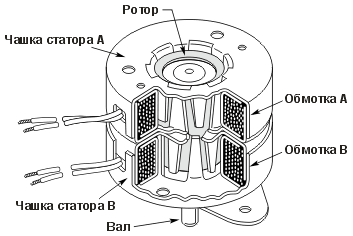
Рис. 4. Разрез шагового двигателя с постоянными магнитами.
Для удешевления конструкции двигателя магнитопровод статора выполнен в виде штампованного стакана. Внутри находятся полюсные наконечники в виде ламелей. Обмотки фаз размещены на двух разных магнитопроводах, которые установлены друг на друге. Ротор представляет собой цилиндрический многополюсный постоянный магнит.
Двигатели с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, котрая ограничивает максимальную скорость. Для работы на высоких скоростях используются двигатели с переменным магнитным сопротивлением.
Гибридные двигатели
Гибридные двигатели являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3.6 – 0.9 град.). Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении (рис. 5).
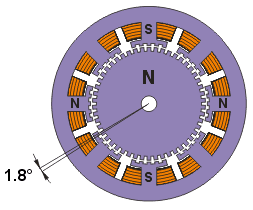
Рис. 5. Гибридный двигатель.
Ротор разделен на две части, между которыми расположен цилиндрический постоянным магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3.6 град. двигателей и 8 основных полюсов для 1.8- и 0.9 град. двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага S двигателя:
S = 360/(Nph*Ph) = 360/N,
где Nph – чило эквивалентных полюсов на фазу = число полюсов ротора, Ph – число фаз, N - полное количество полюсов для всех фаз вместе.
Ротор показанного на рисунке двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1.8 град.
Продольное сечение гибридного шагового двигателя показано на рис. 6. Стрелками показано направление магнитного потока постоянного магнита ротора. Часть потока (на рисунке показана черной линией) проходит через полюсные наконечники ротора, воздушные зазоры и полюсный наконечник статора. Эта часть не участвует в создании момента.
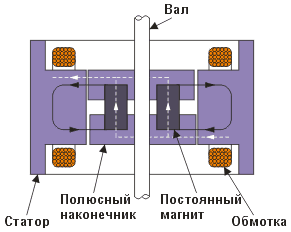
Рис. 6. Продольный разрез гибридного шагового двигателя.
Как видно на рисунке, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубъев. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и, как следствие, обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока (на рисунке показана штриховой белой линией), которая и создает момент. Часть цепи лежит в плоскости, перпендикулярной рисунку, поэтому не показана. В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора, и постоянный магнит его «видит» слабо. Поэтому в отличие от двигателей постоянного тока, магнит гибридного двигателя невозможно размагнитить ни при какой величине тока обмоток. Величина зазора между зубцами ротора и статора очень небольшая – типично 0.1 мм. Это требует высокой точности при сборке, поэтому шаговый двигатель не стоит разбирать ради удовлетворения любопытства, иначе на этом его срок службы может закончиться. Чтобы магнитный поток не замыкался через вал, который проходит внутри магнита, его изготавливают из немагнитных марок стали. Они обычно обладают повышенной хрупкостью, поэтому с валом, особенно малого диаметра, следует обращаться с осторожностью. Для получения больших моментов необходимо увеличивать как поле, создаваемое статором, так и поле постоянного магнита. При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается. Существуют и другие конструкции шаговых двигателей. Например, двигатели с дисковым намагниченным ротором. Такие двигатели имеют малый момент инерции ротора, что в ряде случаев важно. Большинство современных шаговых двигателей являются гибридными. По сути гибридный двигатель является двигателем с постоянными магнитами, но с большим числом полюсов. По способу управления такие двигатели одинаковы, дальше будут рассматриваться только такие двигатели. Чаще всего на практике двигатели имеют 100 или 200 шагов на оборот, соответственно шаг равен 3.6 грд или 1.8 грд. Большинство контроллеров позволяют работать в полушаговом режиме, где этот угол вдвое меньше, а некоторые контроллеры обеспечивают микрошаговый режим.
Биполярные и униполярные шаговые двигатели
В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода (рис. 7а).
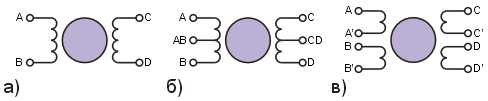
Рис. 7. Биполярный двигатель (а), униполярный (б) и четырехобмоточный (в).
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов (рис. 7б). Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (рис. 7в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности.