Дипломная работа: Диагностика отказов системы регулирования уровня в баке
2. Оценка рассогласования (принятие решения): Этот блок проверяет рассогласования на вероятность отказов и принимает решение, которое затем применяется для определения того, какой отказ произошел. Блок оценка рассогласования, представленный на рисунке 2.2, может выполнять простой пороговый тест (геометрический метод) мгновенной величины или скользящего среднего рассогласования. С другой стороны, он может содержать статистические методы, т.е. обобщенное тестирование отношения правдоподобия или тестирование отношения вероятностей.
2.3.2. Диагностика отказов при работе системы
Диагностика отказов, основанная на моделях рассматривается в основном как диагностика, которая осуществляется во время работы системы. Причиной этого является то, что информация о входе и выходе системы, необходимая для диагностики, основанной на моделях, доступна только во время работы системы. Связь между системой диагностики отказов (или наблюдением) и циклом управления представлена на рисунке 2.3.
Информация, используемая для диагностики – это измеряемый датчиком выход и вход исполнительного механизма. Измерение выхода обычно необходимо для управления по обратной связи, тогда как вход исполнительного механизма требуется для управления действиями, формируемыми контроллером, которые обычно выполняются в микропроцессоре. Поэтому, для выполнения диагностики отказов, обычно, необходимость в дополнительных аппаратных ресурсах отсутствует, за исключением требуемой дополнительной производительности компьютера.
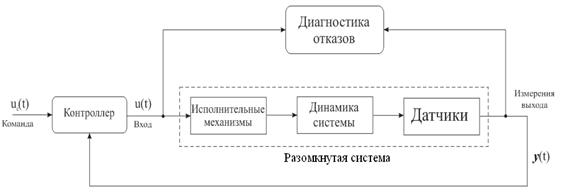
Рис. 2.3. Диагностика отказов в замкнутом цикле
Из рисунка 2.3 можно увидеть, что модель системы, необходимая для диагностики, основанной на моделях, является моделью системы без обратной связи, так как мы рассматриваем систему в цикле управления. Причиной этого является то, что информация о входе и выходе системы, требуемая для диагностики, основанной на моделях, связана с системой без обратной связи. Поэтому, при проектировании схем диагностики нет необходимости рассматривать контроллер. Это соответствует принципам теории управления по причине того, что диагностика отказов может трактоваться как задача наблюдения. Так как вход исполнительного механизма считается доступным, то безразлично система работает в открытом цикле или в закрытом. Задача диагностики при этом одна и та же.
В случаях, когда вход исполнительного механизма u (t) не доступен, для диагностики можно использовать соответствующие команды u c (t). В этому случае, используемая модель представляет собой взаимосвязи между командами u c (t) и измеряемым выходом y (t) и является замкнутой моделью. В этом случае контроллер играет важную роль при проектировании схем диагностики. Надежный контроллер может уменьшить чувствительность к воздействию отказов и очень затруднить диагностику. Эта проблема рассматривалась многими исследователями. Лучшее ее решение – одновременное проектирование схем диагностики отказов и контроллера.
2.3.3. Моделирование систем с отказами
Первый шаг в методе диагностики, основанном моделях, состоит в выполнении математического описания рассматриваемой системы, которое так же описывает все возможные случаи отказов. Будем рассматривать линейные динамические системы со многими входами и выходами. В случае нелинейных систем, можно рассматривать линеаризованную в рабочей точке модель.
Как было отмечено ранее, мы будем рассматривать диагностику отказов для модели системы без обратной связи. В целях моделирования система без обратной связи может быть разделена на три части: исполнительные механизмы, динамика системы и датчики (рисунок 2.4).

Рис.2.4. Система без обратной связи
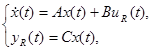
Динамика системы, представленной на рисунке 2.4 может быть описана моделью в переменных состояния:
 (2.1)
(2.1)
где ![]() - вектор состояния системы,
- вектор состояния системы, ![]() - вектор входного сигнала с исполнительного механизма,
- вектор входного сигнала с исполнительного механизма, ![]() - фактический (не доступный) выходной вектор системы; А, В, С - известные матрицы системы соответствующих размерностей.
- фактический (не доступный) выходной вектор системы; А, В, С - известные матрицы системы соответствующих размерностей.

Рис. 2.5. Динамика системы
Когда происходит отказ компонента в системе (рисунок 2.5), динамическая модель системы может быть описана так:
![]() . (2.2)
. (2.2)
Отказ компонента представляет случай, когда изменение некоторых условий в системе приводит к невыполнению динамических отношений, например, утечка в баке в системе двух баков. В некоторых случаях, отказ может быть выражен как изменение параметров системы. Например, при изменении в i -ой строке и j -ом столбце матрицы А , динамика системы может быть описана так:
![]() , (2.3)
, (2.3)
где ![]() - это j-ый элемент вектора
- это j-ый элемент вектора ![]() и
и ![]() - это n-мерный вектор с нулевыми элементами, кроме ‘1’ в i -том элементе.
- это n-мерный вектор с нулевыми элементами, кроме ‘1’ в i -том элементе.
Вообще говоря, реальный выход ![]() системы непосредственно не доступен, для его измерения используются датчики. Этот случай отказа изображен на рисунке 2.6 и математически может быть описан следующим образом (при пренебрежении динамикой датчиков):
системы непосредственно не доступен, для его измерения используются датчики. Этот случай отказа изображен на рисунке 2.6 и математически может быть описан следующим образом (при пренебрежении динамикой датчиков):
![]() , (2.4)
, (2.4)
где ![]() - вектор отказа датчика.
- вектор отказа датчика.
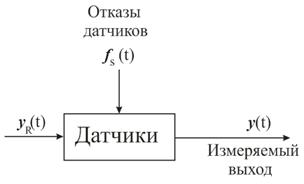
Рис. 2.6. Датчики, выход и измеряемый выход
Правильно выбрав вектор ![]() , мы можем описать все случаи отказов датчиков. Когда выходной датчик показывает фиксированную величину (скажем ноль), вектор измерения y(t)=0 и вектор отказа
, мы можем описать все случаи отказов датчиков. Когда выходной датчик показывает фиксированную величину (скажем ноль), вектор измерения y(t)=0 и вектор отказа ![]() = - yR (t). С другой стороны, когда датчики подвержены мультипликативному отказу, измерение становится
= - yR (t). С другой стороны, когда датчики подвержены мультипликативному отказу, измерение становится ![]() , а вектор отказов может быть переписан так
, а вектор отказов может быть переписан так ![]() =
=![]() .
.