Дипломная работа: Исследование системы управления скоростью электропривода с упругим звеном в передаточном механизме
![]()
Для границ диапазона регулирования имеем:
![]()
![]()
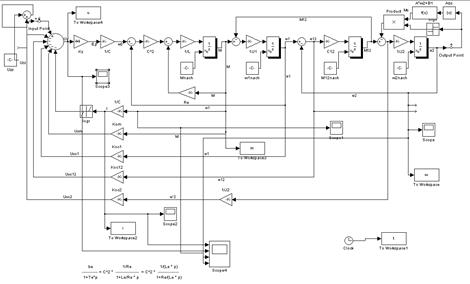
Выполним моделирование электропривода постоянного тока с управляемым преобразователем в цепи якоря и упругой механической частью.
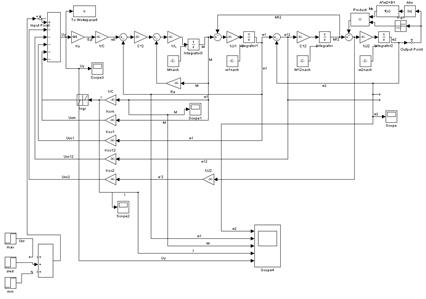
Модель объекта управления с модальным регулятором в среде MATLAB 6.1.:
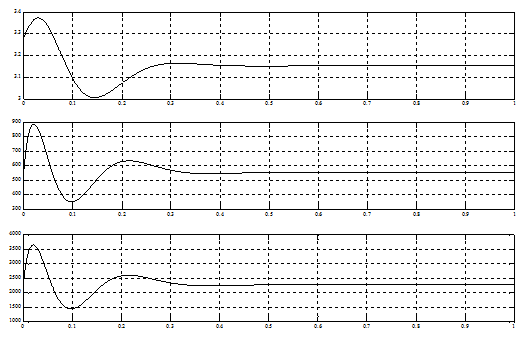
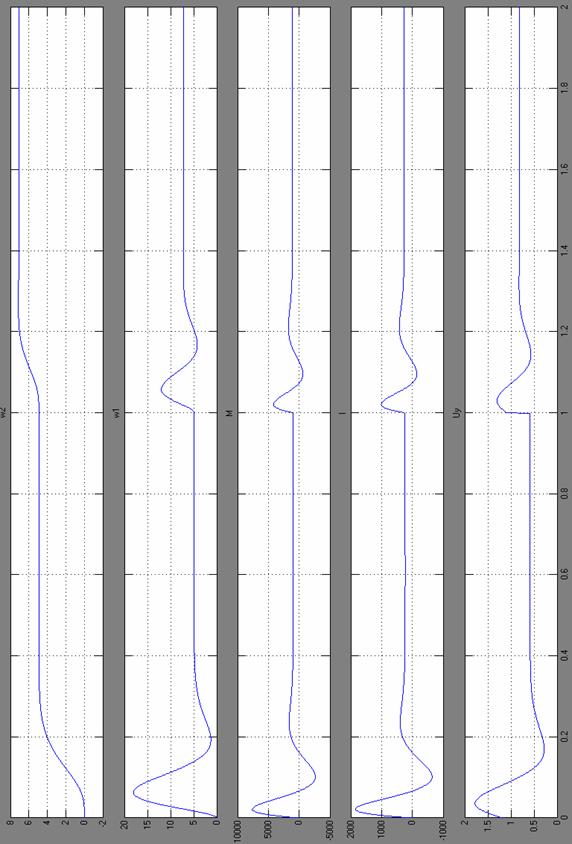
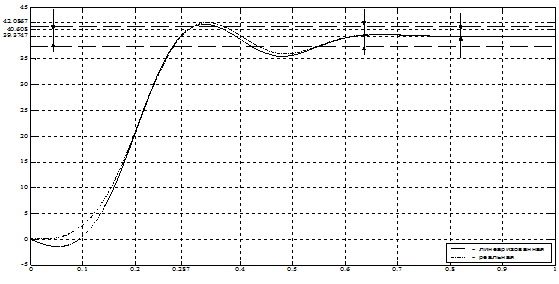
Результаты моделирования:
Пуск до ![]()
 |
???? ??
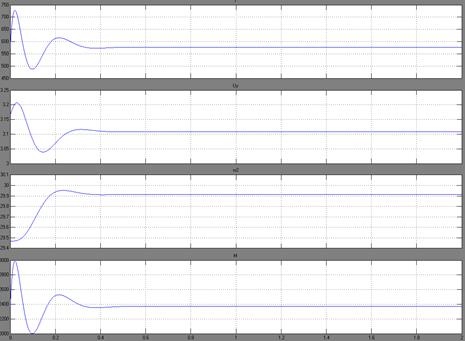
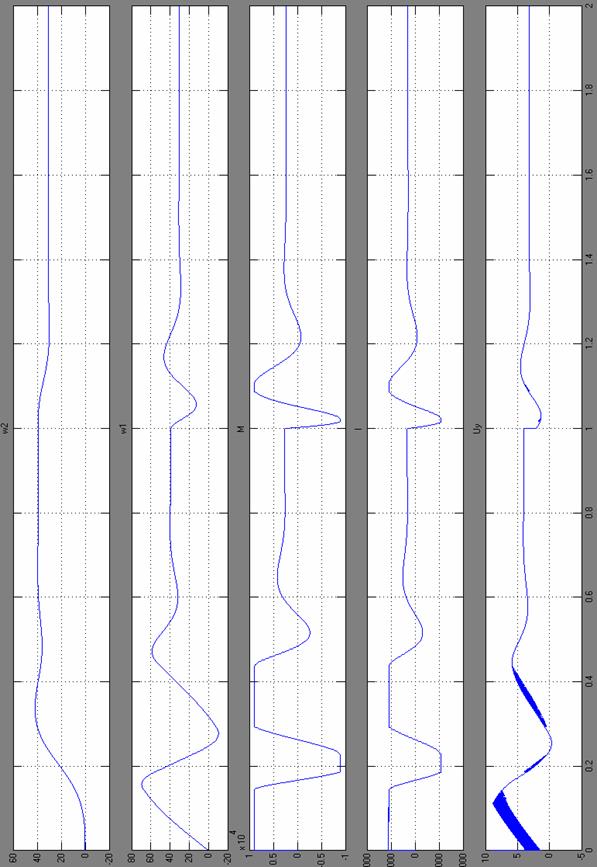
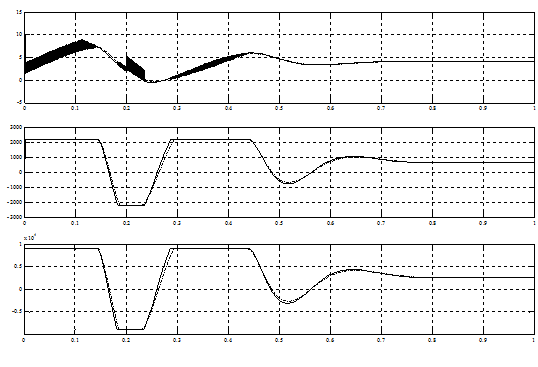
Результаты моделирования:
 |
???? ??
 |
![]()
![]()
![]()
![]()
![]()
![]()
Пуск до ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
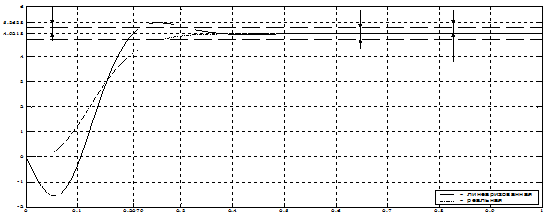
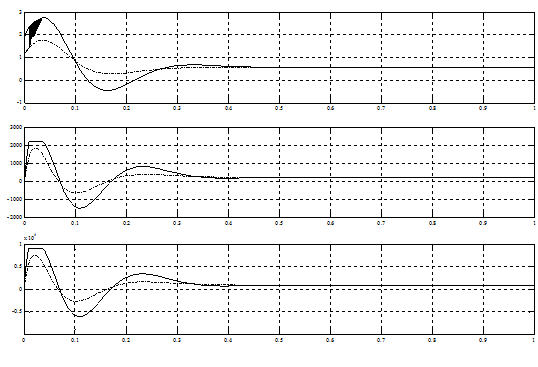
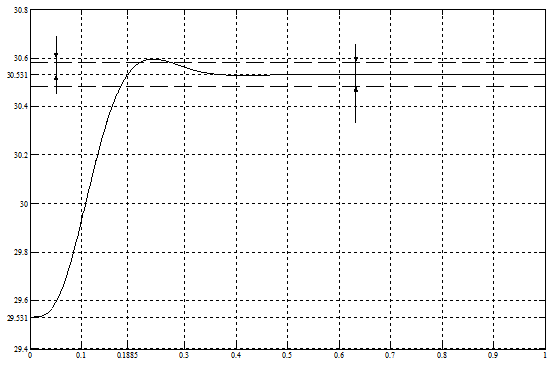
Проверка отработки задания ![]() ,
, ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()