Дипломная работа: Оптимізація параметрів динамічної системи підресорювання корпуса БТР
По командах мікропроцесора регулятор жорсткості за допомогою електроклапана 9 підключає або відключає третій гідропневматичний балон, вибираючи режим підвіски.
«М'який» режим підвіски: при підключеному живленні електроклапан відкриває доступ до високого тиску з головного акумулятора в трубки живлення регуляторів жорсткості. При цьому тиск у робочій системі дорівнює тиску в головному акумуляторі. Золотник регуляторів жорсткості з'єднує три гідропневматичних балони. Рідина циркулює від гідроциліндрів підвіски до балонів через гідроамортизатори та назад.
«Спортивний» режим підвіски: при відключеному живленні електроклапан 9 закритий, трубки живлення регуляторів жорсткості з'єднані, рідина циркулює з поверненням у бак. При цьому тиск дорівнює нулю. Золотник регуляторів жорсткості перебуває в положенні, що перешкоджає проходженню рідини між двома основними й додатковими гідропневматичними балонами.
Робота підвіски залежить від одержуваної від датчиків інформації й переробки її мікропроцесором, що при виявленні якого-небудь відхилення (від попередньо уведених даних) подасть команду на перехід в «спортивний» режим.
Датчик кута повороту й кутової швидкості кермового колеса інформує про досягнення граничних значень цих параметрів. У цей момент відбувається перехід в «спортивний» режим. Підвіска залишається в даному режимі доти, поки кут повороту кермового колеса не буде нижче граничного значення. У результаті хитання зменшується й сповільнюється з однієї сторони завдяки переходу підвіски в «спортивний» режим, з іншого боку - припиненню сигналів елементів підвіски правого й лівого бортів.
Датчик тиску в гальмівній системі інформує про досягнення еталонного його значення, коли відбувається перехід в «спортивний» режим. Підвіска залишається в такому режимі до падіння тиску нижче заданої межі.
Датчик крену (коливання) кузова реєструє поворот торсіонного вала. Перехід в «Спортивний» режим відбувається при досягненні певного рівня крену кузова.
Датчик швидкості автомобіля інформує про її значення, коли необхідно визначити дані, застосовувані при переході в «спортивний» режим по сигналах інших датчиків, а також для забезпечення більшої чутливості до повороту кермового колеса на великій швидкості або до крену (коливанню) кузова на малій швидкості руху автомобіля.
На панелі приладів розташовані перемикачі, за допомогою яких водій може вибрати одну із двох програм: SPORT або AUTOMATIC.
При роботі із програми SPORT напруга на електроклапані відсутня. Підвіска працює в «жорсткому» режимі. Однак при розгоні для зрівняння тиска в елементах підвіски обох мостів автоматично міняється режим. У режимі AUTOMATIC живлення подане на електроклапан. Підвіска працює в «м'якому» режимі. Але залежно від зчитаної датчиками інформації мікропроцесор видає або не видає команду на перехід в «жорсткий» режим. У результаті є можливість забезпечення комфорту більшої частини шляху й тимчасовий перехід в «жорсткий» режим при відповідних умовах.
2.2.2 Безперервне керування демпфуванням (CDC)
Цю систему активно застосовує фірма Opel на своїх останніх версіях автомобіля Astra. В основу електронної системи керування демпфіруванням входять чотири двухтрубних амортизатори з газовим підпором і регульованими електромагнітними клапанами. Вони встановлені збоку в нижній частині амортизатора й усередині самого поршня, безупинно й точно управляють характеристиками амортизаторів з урахуванням стану дорожнього покриття, індивідуального стилю водіння, швидкості, вертикального прискорення кожного колеса, кута повороту керма.
Система CDC використовує принцип «Skyhook». Принцип «Skyhook» полягає в тому, щоб підтримувати кузов у максимально стійкому стані за рахунок змінного демпфірування, незалежно від умов руху. Для цього, система використовує як опорну крапку «так би мовити» уявну віртуальну площину (наприклад небо над автомобілем), що зберігається як обчислювальна модель у блоці керування системи CDC. Ціль полягає в тому, щоб утримувати кузов автомобіля наскільки це можливо горизонтально, щодо цієї площини. Всі вертикальні переміщення компенсуються в максимально можливому ступені приведенням у дію амортизаторів. На підставі сигналів від датчиків прискорення керуючий модуль системи CDC у режимі реального часу за допомогою спеціальної матриці параметрів розраховує оптимальні характеристики амортизаторів для кожного окремого колеса. Компоненти системи (CDC) показані на Рисунку 2.5.
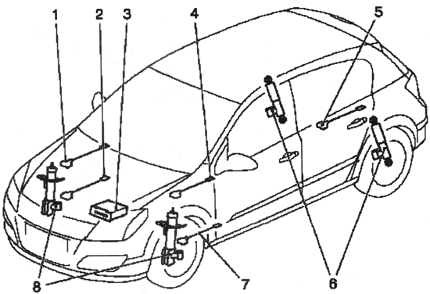
Рисунок 2.5 - Розташування компонентів системи (CDC)
На Рисунку 2.5 позначені наступні компоненти системи (CDC): 1 — передній правий датчик на кузові (прискорення кузова); 2 — правий датчик пружинної стійки (прискорення колеса);3 — блок керування CDC; 4 — передній лівий датчик на кузові (прискорення кузова); 5 — задній датчик на кузові (прискорення кузова); 6 — задній амортизатор CDC; 7 — лівий датчик пружинної стійки (прискорення колеса); 8 — передня пружинна стійка CDC
2.2.3 Магнітний контроль переміщення (MRC)
Трохи інший підхід застосувала фірма Delphi. В амортизаторах цієї фірми використана технологія MRC (Magnetic Ride Control - магнітний контроль переміщення), у ній відсутні вище описані способи регулювання характеристик. В основі цієї технології стоїть магнито-реологічна рідина, що працює як звичайне масло, але в ній утримуються магнітні частки із спеціальним покриттям, що перешкоджає їхньому злипанню. Розмір цих часток – трохи більше мікрона, і їхня кількість у рідині близько 30% від усього обсягу. Зміну перетерпів і сам амортизатор. Тепер у його поршень убудований електромагніт, струм у якому змінює окремий контролер, а проведення до поршня йдуть усередині штока. Контролер посилає струм на котушку, що створює магнітне поле. Під дією поля магнітні частки вибудовуються «у лінію», тим самим збільшуючи в'язкість масла в області отворів. Тому такий амортизатор працює тихіше, структура масла більше «однорідна», а не «скуйовджена», як у звичайних амортизаторах. Час реакції менше, ніж в описаних вище електронних системах, приблизно в 10 разів. І характеристики міняються не східчасто, як у випадку з FSD, а постійно залежно від ходу підвісок, швидкості обертання коліс, положення кермового колеса й температури самого масла.
2.2.4 Система пневматичного підресорювання
Фірма «Міцубісі» в 1984 році випустила «Галант - ройал». Це передньопривідний автомобіль, що має позаду підвіску зі зв'язаними важелями, а попереду підвіску на напрямних пружинних стійках. На відміну від інших конструкцій, тут в обох підвісках усередині пружин розміщений частково несучий пневматичний елемент. Він складається з допоміжної порожнини й пневматичного діафрагменого балона, що відкривається по корпусі стійки й має усередині звичайний гумовий додатковий пружний елемент. У верхній частині цього вузла змонтований електропневматичний клапан, що може перемикати підресорювання з «м'якого» на «жорстке» [8].
При різких поперечних кренах кузова або при інтенсивному розгоні, або раптовому гальмуванні сенсор пускає в хід цей клапан й у частки секунди здійснюється поворот керуючої штанги, розміщеної усередині порожнього штока. За допомогою золотника штанга перекриває постійний дросель у клапані амортизатора, а також перекриває з'єднання між допоміжною порожниною й пружним пневмобалоном. На Рисунку 2.6 наведений розріз по пружині й вузлу пневматичного підресорювання.
Амортизатор працює по двотрубній схемі; між основними допоміжними клапанами перебуває постійний дросель, що перекривається поворотним золотником при перемиканні з м'якого регулювання на жорстке. Тоді амортизаторна рідина додатково протікає через допоміжний клапан і демпфірування підвищується.
У цей час пружна робота відбувається тільки цим балоном, так що при «жорсткому» регулюванні жорсткість підвіски зростає приблизно на 50 %. Внаслідок чого зменшуються бічні й поздовжні крени кузова. Цьому сприяє також підвищення демпфірування, що становить приблизно 15%.
Перемикання з м'якого регулювання на тверде може відбуватися автоматично або вручну.
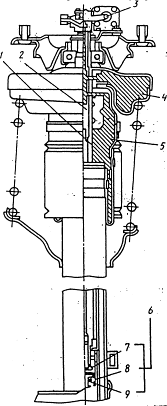
Рисунок 2.6 - Розріз по пружині та вузлу пневматичного підресорювання
На рисунку 2.6 прийняті наступні позначення:
1-шток; 6-клапан амортизатора;
2-керуюча штанга; 7-основний клапан;