Дипломная работа: Подтверждение цикла работы автоматики винтовки с клиновым запиранием под патрон 7,62, газоотводного типа
5.8. Двигатель автоматики.
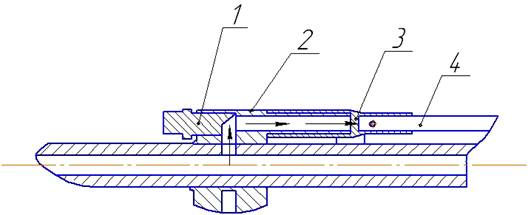
Автоматика винтовки работает на принципе отвода части пороховых газов из ствола в газовую камору 2, в которой они воздействуют через поршень 3 и шток 4 на основное звено — взводную муфту, которая действует на затворную раму, вызывая ее откат.
Газовый регулятор 1 с пазом для прохода пороховых газов ввинчивается в газовую камору.
6. ЦИКЛОГРАММА ОБРАЗЦА
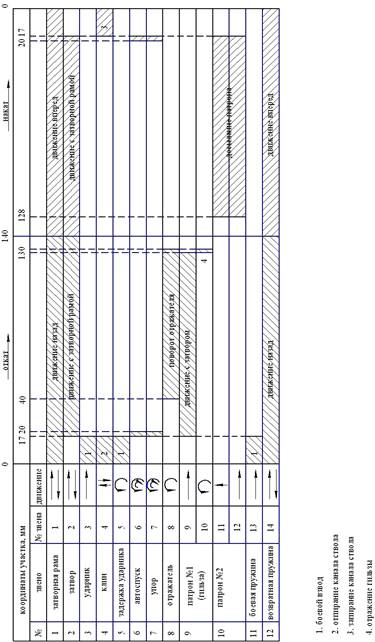
6.1. Ведомость отката-наката.
Ведомость наката:
Общий ход затворной рамы........................................................140мм
Начало отпирания…………........................………………………0мм
Конец отпирания………………………………………................17мм
Начало экстракции гильзы………............……………................17мм
Конец экстракции гильзы………........................……….……...130мм
Начало отражения гильзы………………………………………130мм
Конец отражения гильзы………………………….....….............132мм
Начало взведения ударника...…..……………………..................0мм
Конец взведения ударника………………………………………..17мм
Ведомость отката:
Начало досылания патрона…….……………………….............128мм
Конец досылания патрона…………………….………………….17мм
Начало запирания……………….………………………………..17мм
Конец запирания…………........…………………………………..0мм
6.2. Циклограмма.
7 ОПРЕДЕЛЕНИЕ ПЕРЕДАТОЧНЫХ ОТНОШЕНИЙ, КОЭФФИЦИЕНТОВ ПРИВЕДЕНИЯ МАСС И КОЭФФИЦИЕНТОВ ПЕРЕДАЧИ СИЛ
7.1. ПРОЦЕСС ОТПИРАНИЯ
При движении взводной муфты 1 (рисунок 7.1) под действием давления пороховых газов она воздействует на клин 2 с силой, перпендикулярной наклонной поверхности на клине ![]() , в результате которой возникает сила трения
, в результате которой возникает сила трения ![]() . Под действием этих сил клин прижимается к левым направляющим в ствольной коробке. Со стороны этих направляющих на клин действует сила
. Под действием этих сил клин прижимается к левым направляющим в ствольной коробке. Со стороны этих направляющих на клин действует сила ![]() (равнодействующая всех сил по поверхности направляющих), в результате которой возникает сила трения
(равнодействующая всех сил по поверхности направляющих), в результате которой возникает сила трения ![]() . Клин на взводную муфту действует с силами, равными соответственно
. Клин на взводную муфту действует с силами, равными соответственно ![]() и
и ![]() , направленными в противоположную сторону. Взводная муфта, двигаясь по ствольной коробке, воздействует на неё с силами
, направленными в противоположную сторону. Взводная муфта, двигаясь по ствольной коробке, воздействует на неё с силами ![]() и
и ![]() .
.
Приложим к основному звену потерянную силу ![]() , и к клину -
, и к клину - ![]() и запишем следующие зависимости, проектируя силы на направление движения основного звена 1:
и запишем следующие зависимости, проектируя силы на направление движения основного звена 1:
Для клина:
 (7.1.1)
(7.1.1)