Дипломная работа: Разработка PIC-контроллера устройства измерения временных величин сигналов
3.1 Расчет оптовой отпускной цены
3.1.1 Расчет затрат на основные материалы
3.1.2 Расчет затрат на покупные комплектующие изделия
3.2 Построение графика безубыточности
3.3 Расчет эксплуатационных показателей
3.3.1 Расчет величины капитальных затрат
3.3.2 Расчет показателей эксплуатационных расходов
ВВЕДЕНИЕ
Современная информационно–измирительная техника располагает совокупностью средств измерения различных физических величин электрических, магнитных, механических и др. Огромное количество из этих величин в процессе измерения преобразуется в величины электрические как наиболее удобные для передачи, усиления, сравнения, точного измерения. Поэтому в развитии современной информационно–измирительной техники преобладающее значение приобретает развитие средств измерений электрических величин.
Первые автоматические ЦИП были предложены и разработаны
Ф. Е. Темниковым в середине тридцатых годов. Первые серийноспособные цифровые приборы были разработаны и изготовлены в 1954—1956 гг. в Новосибирске и во Львовском политехническом институте под руководством М. П. Цапенко, К. Б. Карандеева и А. Я. Шрамкова.
Цифровая измерительная техника постепенно стала важнейшей отраслью измерительной техники. Номенклатура цифровых приборов непрерывно расширяется, выпускаются ЦИП различных классов точности от 0,0001 до 2% с различным числом десятичных знаков отсчета от 2 до 8 (в большинстве случаев 4—5 знаков).
Созданы автоматические цифровые приборы, основанные на новых принципах, отличающиеся дискретной, кодированной формой представления результата измерения, высокими точностью и быстродействием. Цифровые приборы решают многие новые задачи измерительной техники.
В настоящее время очень развита микропроцессорная техника и микропроцессоры имеют широкое применение. Поэтому использовать во многих случаях целесообразно микропроцессоры и заменять ими обычные логические схемы, что повышает надежность и долговечность устройства в целом за счет высокой интеграции логических элементов на кристалле полупроводника.
К микропроцессорным БИС относятся и микроконтроллеры т.к. содержат интегрированные ОЗУ, ПЗУ и подсистему ввода вывода.
1.ОСНОВНАЯ ТЕХНИЧЕСКАЯ ЧАСТЬ
1.1 Обзор аналогичных устройств
1.1.1 Классификация цифровых измерительных приборов
В каждом цифровом измерительном приборе определяется числовое значение измеряемой величины в определенной системе счисления, преобразование одного кода в другой, визуальная цифровая индикация или регистрация. Все эти операции занимают определенное время, поэтому ЦИП измеряют и выдают результат измерения дискретно во времени.
Цифровые приборы делятся на цифровые приборы прямого преобразования, уравновешивания (рисунок 1.1) и комбинированные.
Цифровые приборы прямого преобразования в зависимости от характера преобразования делятся на приборы непрерывного действия, выходной код которых следует за измеряемой величиной при каждом ее изменении, превышающем ступень квантования, и на приборы циклического действия, в которых процесс измерения циклически повторяется по заданной программе и новое значение выходного кода определяется после сброса на нуль предыдущего значения.
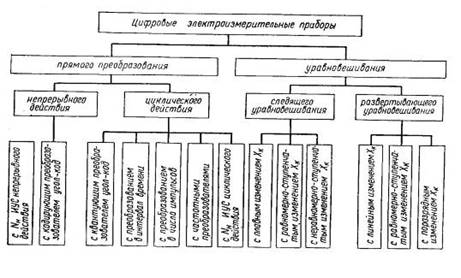
Рисунок 1.1
К цифровым приборам непрерывного действия прямого преобразования относятся, например, цифровые приборы с кодирующими преобразователями угол—код, в которых измеряемая электрическая величина в измерительном механизме преобразуется в угол а поворота подвижной части прибора, а угол а кодирующим преобразователем преобразуется в код.
Большинство цифровых приборов прямого преобразования являются приборами циклического действия. К ним, например, относятся цифровые приборы с вантующими преобразователями угол–код, работающими с фиксированным циклом, цифровые приборы с частотными преобразователями, с преобразователями в интервал времени.
Цифровые приборы уравновешивания построены по замкнутой схеме. В таких приборах в процессе измерения производится сравнение известной компенсирующей величины Хк и неизвестной по значению величины Х или величины, пропорциональной мгновенному значению или интегралу величины X. При этом в процессе уравновешивания одна из величин — Хк или величина, пропорциональная X, изменяется во времени.
Этот процесс уравновешивания продолжается до момента уравнивания величин Х и Хк, который обнаруживается одним измерительным устройством сравнения и усилителем некомпенсации УН.
Цифровые приборы уравновешивания подразделяются на приборы следящего уравновешивания, или следящие приборы, и приборы развертывающего уравновешивания.
1.1.2 Цифровые измерители времени
Интервал времени Тх измеряется цифровым хронометром (рисунок 1.2 а) путем сравнения с интервалом NT0 . Для снижения погрешности необходимо уменьшение Т0 , т. е. повышение скорости счета импульсов счетчиком. Максимальная скорость прямого счета счетчиками импульсов достигает 109 имп/сек, однако у большинства серийных счетчиков импульсов не превышает 107 имп/сек.
Снижение погрешности измерения интервала Тx возможно не только путем уменьшения T0 т. е. ступени квантования, но и путем уменьшения погрешностей d1 t и d2 t , возникающих при квантовании интервала времени Тх
1.1.2.1 Цифровой хронометр с генератором нониусных импульсов
Схема цифрового хронометра с генератором нониусных импульсов состоит из генератора квантующих импульсов с периодом Т0 (рисунок 1.1 б),