Дипломная работа: Разработка системы автоматического контроля уровня сыпучих материалов в цилиндрическом резервуаре
напряжение питания элементов, В – 2.8…6;
лля соединения микросхем, датчиков может применяться витая пара.
Шина MicroLAN, как и шина I2C, построена по технологии Master/Slave. На шине должно быть хотя бы одно ведущее устройство (Master). Все остальные устройства должны быть ведомыми (Slave). Ведущее устройство инициирует все процессы передачи информации в пределах шины. Передача информации от одного ведомого устройство к другому напрямую невозможна. Для этого ведущее устройство должно обращаться к одному ведомому устройству, а затем к другому, причём каждое ведомое устройство должно иметь свой индивидуальный ID – код, который заносится в специальную область микросхемы лазером. Такой код никогда не повторится.
Ещё одним замечательным свойством обладает данная шина: имеется возможность автоматического обнаружения только, что подключенного ведомого устройства. протокол 1 – Wire включает в себя специальную команду поиска, при помощи которой ведущее устройство может осуществлять автоматический поиск ведомых устройств. В процессе поиска Master определяет ID – коды для всех подключенных ведомых устройств. Поиск происходит путём постепенного отсеивания несуществующих адресов. Поэтому для того, чтобы найти все устройства, подключенные к шине требуется значительное время [12].
5.2.1 Схемная реализация 1-Wire интерфейса
Схема соединения ведущего устройства с ведомым однопроводной шиной 1 - Wire показана на рисунке 5.2, нагрузкой шины является сопротивление резистора R1. данный резистор обязан находится в непосредственной близости от ведущего устройства. С большим успехом можно применять микросхемы, у которых выходные каскады построены по КМОП технологии, вместо биполярных транзисторов в выходных каскадах. В режиме ожидания все выходные каскады закрыты. На шине присутствует напряжение логической единицы. Информация же передаётся по шине при помощи отрицательных импульсов.
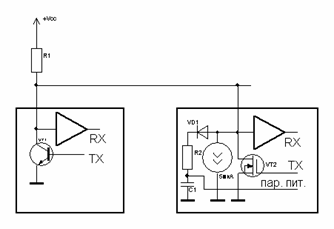
Рисунок 5.2 – Схемная реализация 1-Wire Интерфейса
Источник тока ведомого устройства необходим для создания тока утечки, который, в свою очередь, создаёт нулевой уровень сигнала на внутренних элементах микросхемы или датчика при их отключении от шины 1 – Wire. Диод VD1,резистор R2, конденсатор C1: все эти элементы используются в режиме паразитного питания, т.е. микросхема или датчик могут запитываться от информационной шины. Однако, режим паразитного питания не всегда применим, а только при сверх малом потреблении энергии [12].
5.2.2 Синхронизация и побитная передача информации
Все операции на шине производятся только под управлением ведущего устройства. Оно может производить запись информации в ведомые устройства, а также их чтение. Информация передаётся побайтно, бит за битом, начиная с младшего бита. В любом из этих двух режимов ведущее устройство вырабатывает на шине тактовые сигналы. Для этого оно периодически «подсаживает» шину на землю при помощи выходных транзисторов своего 1 – Wire интерфейса. Полезная информация передаётся путём изменения длительности импульсов тактового сигнала.
Для надёжной работы шины необходимо, чтобы в процессе передачи информации всеми элементами сети, строго соблюдались временные параметры. Каждая микросхема или датчик, подключённые к сети, самостоятельно вырабатывают все необходимые для работы шины интервалы времени, причём для ведущего устройства эти требования более жёсткие, чем к ведомым.
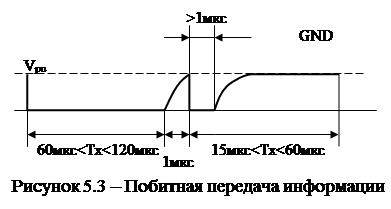
Как видно из рисунка 3.3 величина интервала для передачи одного бита информации должна лежать в пределах от 60 мкс до 120 мкс. Длительность синхроимпульса лежит в пределах 1 мкс. Ведомое устройство, обнаружив на шине передний фронт синхроимпульса, должно сформировать задержку минимум на 15 мкс, и затем произвести проверку сигнала на шине. Допустимый разброс времени задержки для разных типов микросхем и датчиков лежит в пределах от 15 мкс до 60 мкс.
В режиме записи нулевого бита ведущее устройство вырабатывает только синхроимпульсы, длительность которых равна 1 мкс. Если читаемый бит равен нулю, то ведомое устройство продлевает длительность синхроимпульса. Минимальная длительность продлённого импульса составляет 15 мкс. Для этого временного интервала допускается довольно большой разброс. В пределах этого разброса длительность удлинённого импульса может вырасти до 45 мкс. Если же читаемый бит равен единице, то удлинения синхроимпульса не происходит. Для того, чтобы правильно оценить значение читаемого байта ведущее устройство должно прочитать уровень сигнала на шине сразу после окончания синхроимпульса, но не позднее, чем через 15 мкс [12].
5.2.3 Обнаружение присутствия на линии
Любой цикл обмена данными в сети MicroLAN начинается с импульса сброса (рисунок 5.4). Импульс сброса – это длинный отрицательный импульс на шине 1 – Wire, вырабатываемый ведущим устройством.
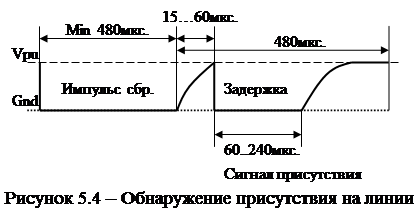
Временные параметры показаны на том же рисунке. С импульсом сброса, тесно связан ещё один служебный сигнал – сигнал присутствия на шине. Сигнал присутствия вырабатывает каждое ведомое устройство сразу же после окончания действия импульса сброса. Ведущее устройство должно проконтролирова