Дипломная работа: Разработка устройства автоматического регулирования света на микроконтроллере
Регулировка мощности основана на реверсивном принципе управления фазой. Нагрузка включается в каждом полупериоде сети в момент перехода сетевого напряжения через нуль и выключается через определённый интервал времени в зависимости от требуемого уровня яркости. Коммутация нагрузки осуществляется мощными MOSFET транзисторами (Транзистор1 и Транзистор2 на Рис.2.3). Такое решение имеет целый ряд преимуществ перед классической схемой прямого фазового регулирования на основе триака:
- "мягкое" управление транзистором позволяет снизить уровень помех и звон нити лампы – не нужен громоздкий сетевой фильтр, снижающий эффективность и зачастую являющийся источником неприятного жужжания;
- благодаря нарастанию напряжения с нуля и малому звону нити, лампы служат намного дольше;
- для управления MOSFET транзистором требуется гораздо меньший ток;
- более низкое падение напряжения на переходе транзистора сокращает тепловыделение;
- отсутствие понятия "ток удержания" позволяет плавно регулировать малую яркость.
Диодный мост выполняет три функции:
- создаёт пульсирующее однополярное напряжение для питания нагрузки;
- выпрямляет сетевое напряжение для питания схемы;
- обеспечивает сетевое напряжение удвоенной частоты (100 Гц), используемое МК для определения момента перехода фазы сети через нуль.
Детектирование перехода сетевого напряжения через нуль осуществляется тем же делителем напряжения и тем же каналом встроенного в МК АЦП, которые предназначены для измерения напряжения на лампе. Это позволяет отказаться от встроенного в МК компаратора и уменьшить тем самым потребляемый ток. Фильтрация сетевых помех реализуется программно.
Блок питания выполнен по бестрансформаторной схеме с гасящим резистором (балластом). Строить блок питания по трансформаторной схеме тоже не получится, т.к. не существует сетевых трансформаторов, которые подходили бы по габаритам (максимально допустимая высота 13 мм).
В качестве регулирующего элемента применён прецизионный микромощный источник опорного напряжения +5 В параллельного типа (далее по тексту ИОН). По сравнению с обычным стабилитроном, выбранный ИОН имеет два важных преимущества. Во-первых, одновременно со стабилизацией питания МК получается стабильное опорное напряжение АЦП [3]. Во-вторых, на порядок уменьшается потребляемый регулирующим элементом ток (примерно с 1 мА до 0,1 мА).
Устройство имеет защиту от короткого замыкания, превышения мощности нагрузки и повышения сетевого напряжения.
2.4 Разработка алгоритма управления
Программа составлена и отлажена в бесплатной среде разработки VM Lab версии 3.14 (в окне 'About Visual Micro Lab' эта версия указана как 3.12).
Код программы написан на языке ассемблера, содержит более 1500 строк, занимает в памяти программ МК более 3 КБ. Задействованы все 32 регистра, 51 байт оперативной памяти (SRAM, ОЗУ), 45 байт энергонезависимой памяти EEPROM.
На первый взгляд, возможности МК ATmega16, имеющего 16 КБ программной памяти, 1 КБ SRAM, 512 байт EEPROM, и богатый набор периферийных устройств, кажутся избыточными. На самом деле, выбор МК "с запасом" сделан умышленно, чтобы иметь возможность совершенствовать устройство и наращивать его функциональные возможности.
При необходимости код может быть перенесён на другие МК семейства ATmega.
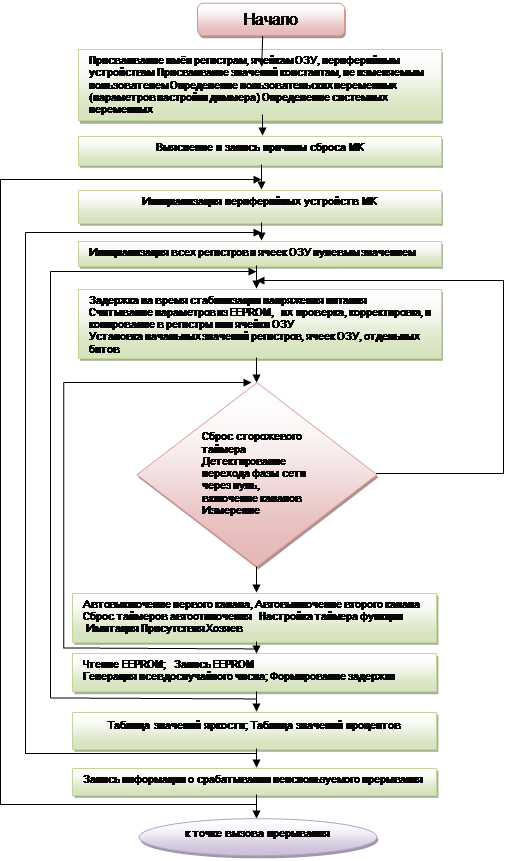
Алгоритм управления показан на Рис.2.4. Каждый блок начинается с названия файла, в котором размещён программный код данного блока. Подпрограммы обозначены блоком меньшего горизонтального размера. Среди них есть функции, т.е. подпрограммы, возвращающие значения. Для упрощения они тоже называются подпрограммами. Отличие подпрограмм, расположенных в файле ProceduresINT.asm, от подпрограмм в файле ProceduresEXT.asm заключается в том, что первые предназначаются только для данного проекта, а вторые являются универсальными и могут найти применение в других проектах. Блок Startup.asm тоже использует некоторые подпрограммы, но для упрощения восприятия рисунка эти связи на блок-схеме не показаны.
2.5 Разработка программного обеспечения микроконтроллера
Далее кратко рассмотрены ключевые моменты программной части проекта. Дополнительная информация содержится в комментариях, которыми снабжена практически каждая строка программы. Листинг программы и объектный файл приведен в Приложении А. Алгоритм работы второго канала полностью аналогичен алгоритму работы первого, поэтому комментарии приводятся только для первого канала. По этой же причине в названиях регистров, процедур и т.п. номер канала либо не указывается совсем, либо обозначается буквой "X" или "x". Команды, начинающиеся с символа комментария (";") в начале строки, предназначены для облегчения разработки, отладки и тестирования.
 | ||
| ||
Они ускоряют ход выполнения программы на этапе отладки. Закомментированные команды, перед которыми есть несколько знаков пробела, не используются в данном проекте, но оставлены в качестве шаблона для применения того же кода в других проектах. Для поддержания совместимости символы табуляции заменены знаками пробела.
Программа оптимизирована по быстродействию, поскольку, чем меньше времени потребуется для выполнения кода, тем большей максимальной яркости можно достигнуть (эта взаимосвязь подробно рассмотрена далее). Особое значение имеет время выполнения процедуры ADCSampling. От этого зависит качество стабилизации, т.е. насколько быстро устройство может реагировать на колебания сетевого напряжения. В текущей реализации процедура ADCSampling выполняется за 21 мкс (без учёта времени преобразования АЦП, на которое требуется 27 мкс).
Адресное пространство энергонезависимой памяти разделено на три области. В первой хранятся настраиваемые пользователем параметры устройства, во второй – системные переменные, в третьей – результаты диагностики. Первая область отделена от второй несколькими пустыми ячейками, значения которых равны $FF. Третья область находится в конце адресного пространства. Так сделано для удобства восприятия данных в окне симулятора VMLab, а также для упрощения ориентации в файле EEPROM dimmer.eep, когда требуется определить параметры настройки устройства. Первые 16 ячеек EEPROM не используются. Помимо удобства восприятия, это предохраняет содержимое первой ячейки от случайного изменения, когда регистр адреса EEPROM равен нулю. Нулевое значение присваивается этому регистру во время инициализации (блок Reset.asm). По той же самой причине не используется и последняя ячейка EEPROM, чтобы исключить изменение её содержимого, когда регистр адреса равен максимальному значению $01FF.
Принимая во внимание ограниченное количество циклов перезаписи EEPROM (100 000 согласно паспортных данных), в памяти сохраняются только самые необходимые данные, а именно уровень установленной пользователем яркости и текущее состояние устройства.
Прерывания не задействованы. Программный код, расположенный в блоке Main.asm, выполняется в бесконечном цикле. Тем самым удаётся повысить быстродействие за счёт отказа от команды RETI и команд работы со стеком. Тем не менее, в целях диагностики неисправностей, срабатывание любого прерывания фиксируется и запоминается в EEPROM (подпрограмма WrongINT.asm). Также в целях диагностики запоминается причина, вызвавшая сброс МК (блок ResetCause.asm). Ячейки диагностики, как уже отмечалось, находятся в конце области EEPROM. Если значение хотя бы одной из них отлично от нуля, это говорит о наличии неисправности.
Сторожевой таймер настроен на максимальный период срабатывания (2 секунды). Чем больше интервал, тем легче заметить срабатывание таймера. Особенно это помогает на этапе отладки.
Супервизор питания запрограммирован на минимальный порог 2,7 В. За счёт этого обеспечивается надёжный запуск МК с учётом большой ёмкости конденсатора, установленного в фильтре питания. Супервизор гарантирует стабильный запуск независимо от того, на какое время пропадёт напряжение в сети.