Дипломная работа: Разработка ветроэнергетической установки
где ρ – плотность воздуха, кг/м3 ;
VВ – скорость ветрового потока, м/с;
АВТ – эффективная площадь, ометаемая ветротурбиной, м2 ;
![]() – коэффициент использования ветротурбины энергии ветра (коэффициент мощности);
– коэффициент использования ветротурбины энергии ветра (коэффициент мощности);
![]() – быстроходность ветротурбины
– быстроходность ветротурбины
При изменении скорости ветрового потока точки Мmax и Сmax образуют линии максимальных моментов и линию оптимального отбора мощности ветротурбины.
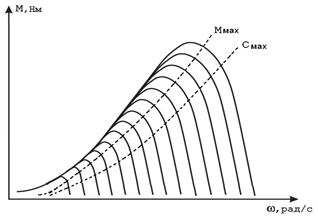
Рисунок 1.8 – Семейство механических характеристик ветротурбины
Быстроходность ветротурбин является, возможно, самым важным для их характеристики параметром, зависящим от трех основных переменных: радиуса ометаемой ветротурбиной окружности, его угловой скорости вращения и скорости ветра. Как безразмерная величина она является основным параметром подобия при исследовании и конструировании ветроэлектрогенераторов. [6]
1.5 Имитация поведения реальных ветротурбин
Экспериментальные характеристики ветродвигателей получают либо в аэродинамической трубе, где создается искусственный воздушный поток, либо в природных условиях в ветросиловой лаборатории с башней, оборудованной специальными приборами.
Экспериментальные характеристики ветродвигателей получают по инерционному методу Аэродинамического института. Этот метод основан на законе инерции вращающихся масс. Чтобы сообщить вращающемуся вокруг своей оси телу известное угловое ускорение, необходимо действие на это тело вращающегося момента, величина которого равна моменту инерции тела, в данном случае ветрового колеса. Относительно оси его вращения, умноженному на угловое ускорение, т. е.
![]() (1.8)
(1.8)
где М – вращающий момент;
I – момент инерции вращающегося тела;
![]() – угловое ускорение.
– угловое ускорение.
Таким образом, зная угловое ускорение в каждый данный момент времени и момент инерции модели вращающейся ветротурбины, можно определить крутящий момент М = Маэр модели, вызванный внешними силами, т. е. воздушным потоком в аэродинамической трубе.
Определив для каждого момента времени значение угловой скорости ω, находят число модулей Z, которое соответствует полученному крутящему моменту ветряка Маэр , затем строят характеристики Маэр = f(Z) и ξ = f(Z).
Экспериментальные испытания реальных ветротурбин на башне в естественном ветровом потоке ценны и необходимы, потому что получаемые при этом результаты в наибольшей мере отражают работу ветродвигателей в эксплуатации. Воздушный поток в аэродинамической трубе действует на модель с постоянной по величине и направлению скоростью, в то время как ветровой поток, набегающий на ветротурбину в реальных условиях, изменяется и по скорости и по направлению. Кроме того, ветротурбины имеют различные детали на крыльях, поставленные с целью регулирования числа оборотов, и крепления, которые не всегда можно выполнить на модели.
Получение экспериментальных характеристик ветротурбин могут быть использованы для электромеханических систем имитирующих их поведение. Это позволит проводить испытания электрооборудования ВЭУ в лабораторных условиях в сжатые сроки без выезда на специализированные полигоны. Кроме того, система имитации позволит испытать поведение схем электрооборудования ВЭУ во всех возможных режимах. Адаптация системы имитации (имитатора) под конкретную ветротурбину подразумевает его реализацию на базе автоматизированного электропривода (АЭП) с перепрограммируемой микропроцессорной системой управления (МПСУ).
Обобщенная структурная схема ВЭУ приведена на рис. 1.9. АЭП имитатора должен реализовывать механические характеристики различных ветротурбин MД = f(wД , VВ ) с учетом мультипликатора (М) при заданных скоростях ветрового потока (ВП). При этом математическое описание параметров ВП может быть получена вероятностными методами.
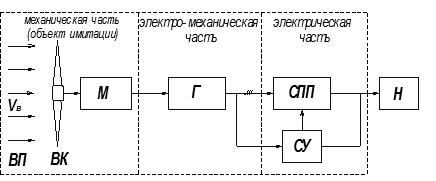
Рисунок 1.9 – Структурная схема ВЭУ
Одним из возможных направлений разработки АЭП имитатора является его реализация на базе привода постоянного тока (рис. 1.10). Одним из достоинств ДПТ является широкое и плавное регулирование скорости вращения, линейность и однозначность характеристик, отсутствие “самохода” (при снятии сигнала управления), быстродействие.
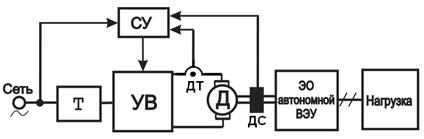
Рисунок 1.11 – Структурная схема АЭП имитатора ВТ
2 СИЛОВОЙ ПОЛУПРОВОДНИКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ В СИСТЕМЕ ЭЛЕКТРОПРИВОДА ИМИТАТОРА
2.1 Структура электропривода
Электропривод – электромеханическая система, состоящая в общем случае из взаимодействующих электрических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними сопредельными электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса.