Дипломная работа: Устройство сбора информации
Персональный компьютер IBM PC на процессоре 8088 фирмы Intel оказался тем долгожданным стандартом, который с радостью поддержали многочисленные программисты и фирмы-изготовители прикладного программного обеспечения: наконец то появился компьютер солидной фирмы, для которого можно было разрабатывать и успешно продавать достаточно сложные, совершенные и универсальные программы. По сути дела, компьютер IBM PC создал не только стабильный и обширный рынок ПК, но и огромный рынок прикладного ПО, на котором за последние полтора десятилетия разбогатело множество венчурных фирм. Вот яркий тому пример. Компьютер IBM PC почти с самого начала работал под управлением дисковой операционной системы DOS, которую разработала для IBM маленькая и никому тогда не известная фирма Microsoft. Сегодня Microsoft - бесспорный флагман индустрии программного обеспечения, одна из богатейших фирм мира, выпускающая не только операционные средства MS-DOS и Windows для управления компьютерами, но и различные прикладные пакеты. Разумеется, персоналка IBM PC оказалась только первым шагом в верном направлении. Затем фирма IBM выпустила множество моделей персональных компьютеров XT, AT, PC/1 и PC/2 на различных процессорах Intel 8086, 80286, 80386, 80486.
Все эти компьютеры предназначены для работы под управлением операционной системы DOS или в графической среде Windows. Этим машинам, не занимающим и половины поверхности обычного письменного стола, покоряются все новые и новые классы задач, которые ранее были доступны лишь системам, занимавшим не одну сотню квадратных метров. Наверное, никогда прежде человек не имел в своих руках инструмента, обладающего столь колоссальной мощью при столь микроскопических размерах.
1 ОСНОВНАЯ ТЕХНИЧЕСКАЯ ЧАСТЬ
1.1 Обзор аналогичных подсистем, устройств и алгоритмов
В недалеком прошлом измерение аналоговых величин представляло собой довольно громоздкий и неудобный процесс – информация с датчиков поступала на самописцы, а затем полученные графики анализировались и обрабатывались специалистами.
В наше время эти задачи можно решать гораздо проще – с помощью аналогово-цифровых преобразователей (АЦП). Эти устройства преобразовывают аналоговую информацию в цифровую, которая удобна для восприятия компьютером.
Последние десятилетия обусловлены широким внедрением в отрасли народного хозяйства средств микроэлектроники и вычислительной техники, обмен информацией с которыми обеспечивается линейными аналоговыми и цифровыми преобразователями (АЦП и ЦАП).
Современный этап характеризуется больших и сверхбольших интегральных схем ЦАП и АЦП обладающими высокими эксплуатационными параметрами: быстродействием, малыми погрешностями, многоразрядностью. Включение БИС ЦАП и АЦП единым, функционально законченным блоком сильно упростило внедрение их в приборы и установки, используемые как в научных исследованиях, так и в промышленности и дало возможность быстрого обмена информацией между аналоговыми и цифровыми устройствами.
Цифро-аналоговые и аналого-цифровые преобразователи АЦП находят .широкое применение в различных областях современной науки и техники. Они являются неотъемлемой составной частью цифровых измерительных приборов, систем преобразования и отображения информации, программируемых источников питания, индикаторов на электронно-лучевых трубках, радиолокационных систем, установок для контроля элементов и микросхем, а также важными компонентами различных автоматических систем контроля и управления, устройств ввода—вывода информации ЭВМ. На их основе строят преобразователи и генераторы практически любых функций, цифроуправляемые аналоговые регистрирующие устройства, корреляторы, анализаторы спектра и т. д. Велики перспективы использования быстродействующих преобразователей в телеметрии и телевидении. Несомненно, серийный выпуск малогабаритных и относительно дешевых АЦП еще более усилит тенденцию проникновения метода дискретно-непрерывного преобразования в сферу науки и техники. Одним из стимулов развития цифро-аналоговых и аналого-цифровых преобразователей в интегральном исполнении в последнее время является широкое распространение микропроцессоров и методов цифровой обработки данных. В свою очередь потребность в АЦП стимулирует их разработку и производство с новыми, более совершенными характеристиками. В настоящее время применяют три вида технологии производства АЦП: модульную, гибридную и полупроводниковую. При этом доля производства полупроводниковых интегральных схем (ИМС ЦАП и ИМС АЦП) в общем объеме их выпуска непрерывно возрастает и в недалеком будущем, по-видимому, в модульном и гибридном исполнениях будут выпускаться лишь сверхточные и сверхбыстродействующие преобразователи с достаточно большой рассеиваемой мощностью.
Проектируемое устройство представляет собой микропроцессорную систему обработки информации и управления, реализованную на основе современной элементной базы (БИС и СБИС) и принципа программного управления. Для построения микропроцессорной системы требуется ограниченный набор аппаратных ресурсов, а реализация функций системы возлагается на программное обеспечение. Таким образом, микропроцессорная система – это цифровая система обработки информации и управления, функциональные возможности которой определяются программным обеспечением, а взаимосвязь с внешней средой обеспечивается внешними устройствами (ВУ), такими как : устройства внешней памяти – накопители на гибких магнитных дисках (НГМД) и жестких винчестеровских дисках (НМД); устройства связи с оператором – пульты управления, знакоцифровые индикаторы, клавиатура и телевизионные мониторы, графические дисплеи, печатающие устройства (принтеры), устройства ввода/вывода графической и речевой информации, изображений; устройства сопряжения с объектами – аналоговые и цифровые датчики информации и исполнительные механизмы; устройства дистанционной связи – модуляторы/демодуляторы (модемы) и пр.
Проектируемая система выполнена на основе микропроцессорного комплекта БИС К1810, который изготовлен по высокопроизводительной nМОП-технологии и предназначен для построения 8- и 16-разрядных микропроцессорных систем широкого диапазона: от однопроцессорных микроконтроллеров и микро-ЭВМ до многопроцессорных распределенных микропроцессорных систем. В основу комплекта положены три основных принципа:
1) распределение функций процессора между универсальными и специализированными БИС;
2) ориентация БИС на построение мультипроцессорных систем;
3) иерархическая организация внутрисистемного интерфейса.
Функционально микропроцессорная система предназначена для последовательного опроса 8-ми аналоговых датчиков и передачи информации в ОЗУ и последующей ее обработки. Опрос датчиков, преобразование аналоговой информации в цифровую, запись информации в ОЗУ производится под управлением микропроцессора К1810ВМ86.
Рассмотрим аналогичную микропроцессорную систему, выполненную на основе микропроцессорного комплекта БИС КР580.
Основу всей аппаратной части микросистемы составляет процессорный модуль. Он выполняет все необходимые операции по чтению и записи данных, выставлению необходимого адреса, организации управляющих сигналов, которые управляют различными частями микросистемы. Процессорный модуль состоит из следующих основных микросхем.
КР580ВМ80 — микропроцессор, способный выполнять функции центрального процессора ЭВМ, т.е. может считывать информацию из внешних устройств, памяти и производить над ней арифметические и логические операции, анализировать результаты вычислений и записывать данные в память и внешние устройства, функционируя при этом под управлением команд из некоторого фиксированного множества, в нашем случае памяти программ, т.е. ПЗУ. Обмен с внешними устройствами и памятью микропроцессор осуществляет через восьмиразрядную шину данных. Микропроцессор КР580ВМ80 обращается к памяти и внешним устройствам через 16-разрядную шину адреса.
КР580ГФ24 — генератор тактовых импульсов. Данная микросхема вырабатывает тактовые синхросерии F1 и F2 для микропроцессора КР580ВМ80. Кроме того, генератор вырабатывает сигналы начальной установки микропроцессора RESET и готовности READY, синхронизированные тактовыми импульсами, и строб STSTB, синхронизированный от процессора по сигналу SYNC и необходимый для фиксации слова состояния процессора в системном контроллере.
КР580ВК28 — системный контроллер. Предназначен для фиксации слова состояния процессора, формирования сигналов управления памятью и внешними устройствами, буферизации шины данных. По этому импульсу происходит фиксация слова состояния в регистре состояния.
КР580ИР82 — буферный регистр. Предназначен для фиксации информации и может использоваться в системах, построенных на микропроцессорах различных серий, в том числе КР580ВМ80. В частности, в системах с микропроцессором КР580ВМ80 буферный регистр может быть использован для хранения слова состояния процессора. В нашем случае два буферных регистра предназначены для фиксации старшей и младшей частей адреса, поступающего от микропроцессора. Если на вход ОЕ поступает разрешающий сигнал низкого уровня, а на входе STB- сигнал высокого уровня, то информация, записанная в буферный регистр, сохраняется до появления разрешающего сигнала на входе STB.
БИС программируемого ПЗУ К556РТ4, на выходе которого формируется сигнал низкого уровня CS, предназначенный для выборки микросхемы памяти. Также БИС ПЗУ подсоединена к шине данных, через которую память производит обмен информацией. Управляющий сигнал MRDC поступает от процессора и указывает на чтение памяти.
ОЗУ организовано на БИС ОЗУ статического типа. Требуемый объем ЗУ обеспечивается наращиванием, т.е. путем последовательного соединения адресуемых субблоков. Способ организации ОЗУ с адресным селектором и системной шиной аналогичен. Различие состоит в присутствии управляющего сигнала MWTC, который предназначен для записи в память информации из процессора. Примечательно, что сигнал, поступающий на вход ОЕ микросхемы (разрешение выдачи информации) сформирован из сигналов MRDC и MWTC, объединенных конъюктивно с помощью элемента «И». Эта организация позволяет активировать БИС в момент чтения либо записи.
КР580ВВ55 – программируемый параллельный адаптер, который предназначен для управления внешними устройствами. Данная БИС адресуется с помощью дешифратора, реализованного на микросхеме К155ИД7. Адаптер имеет три порта ввода/вывода (А, В и С), которые могут быть настроены в различных направлениях. Настройка адаптера происходит с помощью следующих сигналов: A1, A0, CSPPI, IORC, IOWC, RESET.
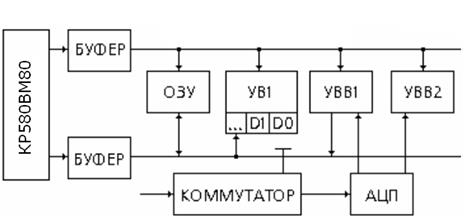
Структурная схема микросистемы представлена на рисунке 1.1.
|
Принцип работы микросистемы состоит в следующем: номер опрашиваемого датчика формируется в одном из РОН, в основном в регистре В. В 8-ми разрядном регистре в 5-ти старших разрядах записываются единицы, а в трех младших разрядах - номер датчика. Первоначально в регистре В записано число F8h : 11111000 = F8h.
При опросе каждого датчика содержимое регистра В увеличивается на 1. При опросе последнего датчика в регистре записывается число FF = 11111111. Добавление следующей 1 обнуляет регистр В. На выходе триггера нуля TZ появляется 1. Номер ячейки ОЗУ, в которую должен быть записан результат опроса датчика, содержится в паре РОН, например, в регистрах HL.
Рассмотрим алгоритм работы микросистемы. Пусть первая занятая ячейка ОЗУ имеет номер 1350h. В нее будет помещен результат опроса 1-го датчика с номером 000. Через аккумулятор и шину данных номер датчика подается на устройство вывода 1 (УВ1). УВ1 подает номер датчика на коммутатор. Коммутатор опрашивает нужный датчик и передает аналоговый сигнал на АЦП. АЦП преобразует аналог. сигнал в цифровой и передает цифровой сигнал на УВВ1. Если в первом такте импульсной последовательности Ф1 МП передает номер датчика, то во втором такте он ожидает прихода сигнала окончания преобразования от АЦП. Сигнал окончания равный 1 передается через УВВ2, через шину данных в аккумулятор. Наличие сигнала окончания аккумулятор проверяет операцией циклического сдвига вправо. Если сигнал окончания пришел, то при сдвиге вправо 1 из младшего разряда аккумулятора передается в триггер сдвига ТС, триггер сдвига устанавливается в состояние 1, и данные из устройства ввода 1 по шине данных передаются в аккумулятор, а из него в ячейку ОЗУ. Содержимое пары регистров HL и регистра В увеличивается. на 1, при этом формируется номер следующего датчика и номер ячейки, куда должен быть помещен следующий результат.