Книга: Проектирование роботехнических средств для поточных линий прядильного производства
Здесь: элемент 1 – привод ходовой секции РС; элементы 2, 7 – приводы рабочих секций; элементы 3, 4, 5, 6, 8, 9, 10 и 11 – исполнительные механизмы. Связь между элементами 1 и 7 обозначена пунктирной линией, т. к. она дублирует связь между элементами 1 и 2. Необходимо заметить, что при числе исполнительных механизмов больше 4, но меньше 8 следует произвести перераспределение связей в системе РС. По нашему мнению, наибольшее число исполнительных механизмов из РС текстильных машин будет иметь автомат присучивания ленты на пневмопрядильных машинах.
Из функционального описания способа действия технической системы РС и схемы взаимосвязей между ее элементами следует, что определенные выходы элемента 1 одновременно являются входами элемента 2; определенные выходы элемента 2 являются входами элементов 3 и 4; определенные выходы элемента 3 являются входами элемента 5 и определенные выходы элемента 4 являются входами элемента 6.
Отношения взаимозависимости между отдельными функциями рассматриваемых элементов относятся к категории связей. Рассмотрим выходные параметры каждого элемента, при изменении которых в процессе эксплуатации должны учитываться требования, предъявляемые к надежности всей системы.
Выходными параметрами всей системы РС являются ![]() – точность позиционирования и
– точность позиционирования и ![]() – время позиционирования. Выходными параметрами элементов 1, 3, 4, 5 и 6 являются:
– время позиционирования. Выходными параметрами элементов 1, 3, 4, 5 и 6 являются: ![]() – точность позиционирования,
– точность позиционирования, ![]() – кинематические характеристики и
– кинематические характеристики и ![]() – прочностные характеристики. Выходными параметрами элемента 2 являются:
– прочностные характеристики. Выходными параметрами элемента 2 являются: ![]() – кинематические характеристики и
– кинематические характеристики и ![]() – прочностные характеристики. Следует заметить, что важным выходным параметром являются динамические характеристики элементов, однако информация об этом уже заложена в их кинематических и прочностных характеристиках.
– прочностные характеристики. Следует заметить, что важным выходным параметром являются динамические характеристики элементов, однако информация об этом уже заложена в их кинематических и прочностных характеристиках.
При рассмотрении выходных параметров каждого элемента можно отметить то, что они могут по-разному влиять на формирование выходных параметров ![]() и
и ![]() всей системы, определяющих ее надежность. Можно выделить три основных свойства этих параметров:
всей системы, определяющих ее надежность. Можно выделить три основных свойства этих параметров:
– ![]() – изменение параметра влияет на работоспособность лишь самого элемента, отказ данного элемента ведет, как правило, к отказу системы;
– изменение параметра влияет на работоспособность лишь самого элемента, отказ данного элемента ведет, как правило, к отказу системы;
– ![]() – параметр участвует в формировании одного или двух выходных параметров всей системы. Его изменения должны учитываться в совокупности с изменением параметров данной категории для других элементов. По отклонению от номинала только данного параметра нельзя судить об отказе элемента;
– параметр участвует в формировании одного или двух выходных параметров всей системы. Его изменения должны учитываться в совокупности с изменением параметров данной категории для других элементов. По отклонению от номинала только данного параметра нельзя судить об отказе элемента;
– ![]() – параметр влияет на работоспособность других элементов, его изменение для остальных частей системы аналогично изменению внешних условий работы.
– параметр влияет на работоспособность других элементов, его изменение для остальных частей системы аналогично изменению внешних условий работы.
Выходной параметр ![]() элементов 3, 4, 5 и 6 обладает двумя свойствами:
элементов 3, 4, 5 и 6 обладает двумя свойствами: ![]() и
и ![]() ; выходной параметр
; выходной параметр ![]() первого элемента обладает следующими свойствами:
первого элемента обладает следующими свойствами: ![]() и
и ![]() . Выходной параметр
. Выходной параметр ![]() всех элементов обладает свойствами
всех элементов обладает свойствами ![]() и
и ![]() , а этот же параметр элементов 3, 4, 5 и 6 имеет еще свойство
, а этот же параметр элементов 3, 4, 5 и 6 имеет еще свойство ![]() . Выходной параметр
. Выходной параметр ![]() всех элементов обладает свойствами
всех элементов обладает свойствами ![]() и
и ![]() ; этот же параметр элементов 1 и 2 имеет также свойство
; этот же параметр элементов 1 и 2 имеет также свойство ![]() . На основании вышеизложенного разработана схема функциональной структуры РС, представленная на рис. 2.
. На основании вышеизложенного разработана схема функциональной структуры РС, представленная на рис. 2.
Анализ этой схемы показывает, что при оценке надежности системы РС большую роль играют взаимосвязи, когда работоспособные элементы оказывают побочные воздействия на другие элементы и могут вывести их из строя. Изменение точности позиционирования элемента 1 влияет на нормальное функционирование элементов 3 и 4, а через них – на элементы 5 и 6; изменение кинематических параметров и прочностных характеристик элемента 1 влияет на время включения в работу элемента 2; изменение тех же параметров элемента 2 влияет на синхронизацию движений между элементами 3 и 4; изменение аналогичных параметров элементов 3 и 4, а через них – на элементы 5 и 6; изменение кинематических параметров и прочностных характеристик элемента 1 влияет на время включения в работу элемента 2; изменение тех же параметров элемента 2 влияет на синхронизацию движений между элементами 3 и 4; изменение аналогичных параметров элементов 3 и 4 влияет на время передачи крутящего момента элементам 5 и 6; изменение этих же параметров элементов 5 и 6 влияет на синхронизацию движений между исполнительными органами РС.
На выходной параметр всей системы РС ![]() – точность позиционирования – влияют точность позиционирования и кинематические характеристики, являющиеся выходными параметрами элементов 1, 3, 4, 5 и 6, а также прочностные характеристики элемента 1. На выходной параметр всей системы РС
– точность позиционирования – влияют точность позиционирования и кинематические характеристики, являющиеся выходными параметрами элементов 1, 3, 4, 5 и 6, а также прочностные характеристики элемента 1. На выходной параметр всей системы РС ![]() – время позиционирования – влияют вышеназванные параметры тех же элементов, а также кинематические характеристики элемента 2 и прочностные параметры элементов 1 и 2. Такой выходной параметр всей системы РС, как
– время позиционирования – влияют вышеназванные параметры тех же элементов, а также кинематические характеристики элемента 2 и прочностные параметры элементов 1 и 2. Такой выходной параметр всей системы РС, как ![]() – точность позиционирования, определяет нормальное функционирование системы «РС – текстильная машина», а именно: надежность работы рассматриваемой системы; выходной параметр
– точность позиционирования, определяет нормальное функционирование системы «РС – текстильная машина», а именно: надежность работы рассматриваемой системы; выходной параметр ![]() – время позиционирования определяет эффективность работы данной системы.
– время позиционирования определяет эффективность работы данной системы.
С целью повышения надежности работы робототехнического средства рассмотрим возможность изменения его функциональной структуры. Очевидно, что из всех выходных параметров элементов РС можно уменьшить или устранить воздействие в функциональной структуре взаимосвязи параметров ![]() – точности позиционирования отдельных элементов. Влияние параметров
– точности позиционирования отдельных элементов. Влияние параметров ![]() на работоспособность всей системы РС устраняется посредством введения жесткой механической фиксации манипулятора относительно рабочего места текстильной машины, где производится вспомогательная технологическая операция по ее обслуживанию. Для этой цели можно использовать зубчатую реечную передачу, храповые механизмы, различные виды фиксаторов. Данные стопорные устройства монтируются на текстильной машине и выставляются относительно ее рабочих мест. Влияние параметров
на работоспособность всей системы РС устраняется посредством введения жесткой механической фиксации манипулятора относительно рабочего места текстильной машины, где производится вспомогательная технологическая операция по ее обслуживанию. Для этой цели можно использовать зубчатую реечную передачу, храповые механизмы, различные виды фиксаторов. Данные стопорные устройства монтируются на текстильной машине и выставляются относительно ее рабочих мест. Влияние параметров ![]() ,
, ![]() ,
, ![]() и
и ![]() на работоспособность РС можно устранить посредством увеличения зоны перекрытия временных диапазонов позиционирования исполнительных механизмов РС при совместном выполнении ими технологической операции по обслуживанию текстильной машины. С этой целью лучше всего применять в конструкции РС кулачковые механизмы. Для того чтобы при этом не увеличилось общее время позиционирования
на работоспособность РС можно устранить посредством увеличения зоны перекрытия временных диапазонов позиционирования исполнительных механизмов РС при совместном выполнении ими технологической операции по обслуживанию текстильной машины. С этой целью лучше всего применять в конструкции РС кулачковые механизмы. Для того чтобы при этом не увеличилось общее время позиционирования ![]() манипулятора, необходимо улучшить кинематические характеристики последнего.
манипулятора, необходимо улучшить кинематические характеристики последнего.
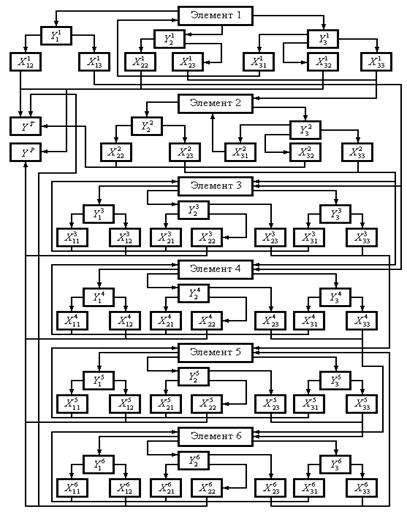
Рис. 2. Функциональная структура робототехнических средств текстильных машин
С учетом вышеизложенного на рис. 3 представлена схема усовершенствованной функциональной структуры РС текстильных машин.
1.2 Моделирование структурных схем исполнительных механизмов робототехнических средств
Технологическая цепочка прядильного производства состоит из большого количества разнообразных по своему назначению и конструктивному исполнению текстильных машин, поэтому с целью снижения затрат времени на проектирование робототехнических средств, имеющих, как правило, несколько исполнительных органов и обслуживающих конкретные типы текстильных машин, имеет смысл выявить общую методику моделирования структурных схем исполнительных механизмов РС.
Для частного случая, а именно для автосъемника бобин, осуществляющего съем наработанных бобин на пневмомеханической прядильной машине и установку пустых патронов на их место, методика поиска новых технических решений его исполнительных органов отражена в работах.
При решении задачи разработки общей методики моделирования структурных схем исполнительных механизмов РС машин прядильного производства, прежде всего, следует определить основной критерий, который необходимо положить в основу оценки получаемых технических решений. Очевидно, что этим основным критерием является надежность функционирования РС, т.к. она в себя включает следующие требования, предъявляемые к работе исполнительных механизмов РС:
– получение требуемой траектории выходного звена исполнительного механизма РС исходя из выполняемой им вспомогательной технологической операции по обслуживанию текстильной машины;
– выполнение кинематических и динамических ограничений, налагаемых на работу выходного звена;
– получение необходимой точности позиционирования выходного звена на обслуживаемом им рабочем месте текстильной машины;
– достижение синхронизации движений между выходными звеньями исполнительных механизмов РС.
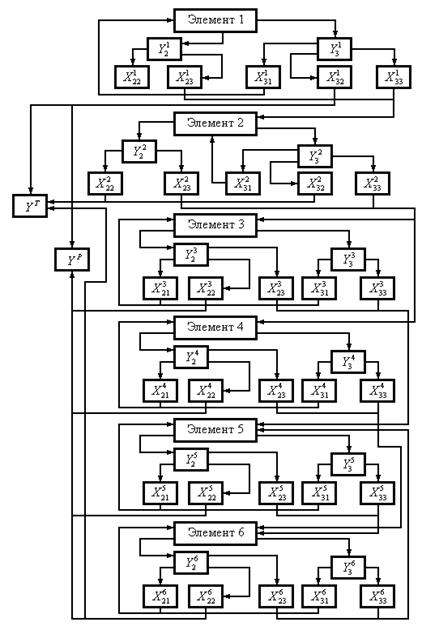
Рис. 3. Усовершенствованная функциональная структура робототехнических средств текстильных машин
В предыдущем пункте показано, что максимальное количество приводов РС текстильных машин может быть равно трем, а максимальное количество исполнительных механизмов равно восьми. При этом один из приводов осуществляет движение РС вдоль фронта текстильной машины, а два других приводят в движение исполнительные механизмы. Учитывая эти условия, произведем оценку надежности исполнительных механизмов РС текстильной машины, которая может быть осуществлена на стадии проектирования и заключается в систематическом исследовании всех вариантов конструкции, втекающих из закономерностей строения совершенствуемого объекта. При этом исследуются как известные, так и новые необычные варианты, которые при простом переборе могли быть упущены. Основные этапы оценки надежности новых технических решений исполнительных механизмов РС текстильной машины заключаются в следующем:
– дается точная формулировка задачи, подлежащей решению;
– раскрываются все важные характеристики объекта, его параметры, от которых зависит решение проблемы;
– раскрываются возможные варианты по каждой характеристике посредством составления морфологической матрицы поиска новых технических решений на основе применения метода Ф. Цвики и ее последующего решения;