Книга: Проектирование роботехнических средств для поточных линий прядильного производства
Согласно вышеизложенному, рассмотрим основные этапы решения проблемы «Увеличить надежность работы РС машины поточной линии прядильного производства». Как было указано ранее, данное РС может состоять из одиннадцати основных элементов, а именно: привода ходовой секции, приводов рабочих секций и исполнительных механизмов, выполняющих технологические операции по обслуживанию текстильной машины, входящей в состав поточной линии прядильного производства. Следовательно, согласно теории надежности для выполнения поставленной задачи надо решить проблему повышения надежности работы каждого элемента системы. Кроме того, надежность работы системы зависит от ее связей с окружением, в данном случае с текстильной машиной поточной линии прядильного производства. На основании этого определено поле поиска решений для проблемы «Увеличить надежность работы РС машины поточной линии прядильного производства», представленное на рис. 4. Используя основные методы повышения надежности элементов, определены поля поиска решения проблем «Увеличить надежность работы 3‑го элемента РС машины поточной линии прядильного производства», а также «Уменьшить количество связей РС с машиной поточной линии прядильного производства». Следует заметить при этом, что элементы данного РС при решении проблемы повышения их надежности работы разделены на две группы. Это обусловлено различиями в характере их функционирования.
Из анализа схем, приведенных на рис. 4–6, следует, что одним из основных путей повышения надежности работы РС машины поточной линии прядильного производства является изменение структурных схем его исполнительных механизмов, в связи с чем необходимо разработать методику моделирования данных структурных схем таких РС.
Для этого раскроем возможные варианты по каждой характеристике исполнительного механизма РС путем составления морфологической матрицы, отражающей закономерности строения усовершенствуемого объекта. Каждая характеристика ![]() обладает определенным числом
обладает определенным числом ![]() различных независимых свойств
различных независимых свойств ![]() ,
, ![]() ,
, ![]() …
…![]() . Например, параметр исполнительного механизма «движение» может иметь независимые свойства
. Например, параметр исполнительного механизма «движение» может иметь независимые свойства ![]() ,
, ![]() , означающие перемещение в плоскости и пространстве. Эти матрицы-строки могут быть записаны в следующем виде:
, означающие перемещение в плоскости и пространстве. Эти матрицы-строки могут быть записаны в следующем виде:
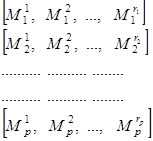
Если в каждой строке матрицы зафиксировать один из элементов, то набор из них будет представлять возможный вариант решения исходной задачи. Если использовать приведенную выше систему матриц для построения р- мерного пространства, то получим морфологический ящик. Полное число ![]() решений в этом случае равно:
решений в этом случае равно:
 .
.
В высшей степени существенно, что вплоть до данного момента не должен ставиться вопрос о ценности того или иного решения. Такое преждевременное любопытство почти всегда наносит ущерб беспристрастному применению морфологического метода. Однако, как только получены все решения, можно сопоставить их с любой системой принятых критериев.
![]() – движение механизма совершается:
– движение механизма совершается:
а) в плоскости ![]() ;
;
б) пространстве ![]() .
.
![]() – наличие взаимодействия механизма с другими
– наличие взаимодействия механизма с другими
рабочими органами РС:
а) именно с одним рабочим органом ![]() ;
;
б) именно с двумя рабочими органами ![]() ;
;
в) именно с тремя рабочими органами ![]() ;
;
г) не имеется ![]() .
.
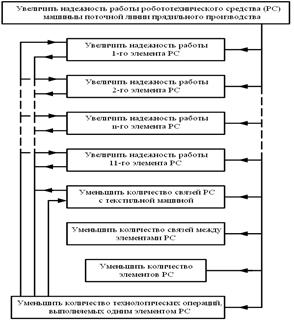
Рис. 4. Поле поиска решений проблемы «Увеличить надежность работы робототехнического средства машины поточной линии прядильного производства»
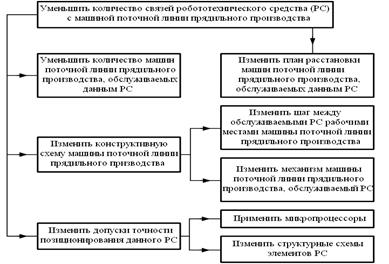
Рис. 5. Поле поиска решений для проблемы «Уменьшить количество связей робототехнического средства с машиной поточной линии прядильного производства»
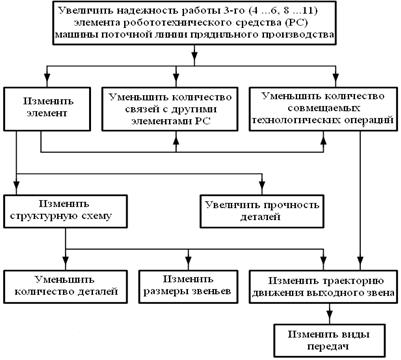
Рис. 6. Поле поиска решений для проблемы «Увеличить надежность работы 3‑го элемента робототехнического средства машины поточной линии прядильного производства»
![]() – пересечение выходным звеном механизма траек-тории выходного звена другого рабочего органа РС:
– пересечение выходным звеном механизма траек-тории выходного звена другого рабочего органа РС:
а) обязательно ![]() ;
;
б) необязательно ![]() ;
;
в) ни в коем случае ![]() .
.
![]() – наличие у механизма принудительного движения от другого рабочего органа РС:
– наличие у механизма принудительного движения от другого рабочего органа РС:
а) обязательно ![]() ;
;
б) необязательно ![]() ;
;