Контрольная работа: Функціональні і структурні схеми систем радіоавтоматики
У кутомірних слідкувальних системах, призначених для супроводу однієї цілі, звичайно використовується рівносигнальний метод пеленгування, при якому за допомогою антенної системи (А) формується рівносигнальна зона (РСЗ). Пеленгаційний пристрій (ПП) (рис. 6), що складається з антенної системи, радіоприймального тракту (РПТ) і вихідних каскадів (ВК), вимірює просторову неузгодженість j між віссю РСЗ zА і напрямком на ціль Ц, а виконавчий пристрій ВП змінює кутове положення вісі РСЗ так, щоб усунути наявну неузгодженість.
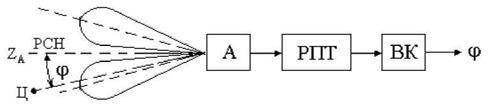
Рисунок 6 – Структурна схема пеленгаційного пристрою
Побудова пеленгаційного пристрою залежить від прийнятого способу формування рівносигнальної зони. У пеленгаційних пристроях з послідовним порівнянням сигналів застосовується один приймач і одна антена. Діаграма спрямованості антени переміщається в просторі (сканує) з періодом ТСК . Вимір кутової неузгодженості виконується порівнянням огинаючої радіосигналу, що періодично змінюється з опорною синусоїдною напругою, синхронізованою і синфазированою з обертанням діаграми спрямованості. Час виміру порівнянний із ТСК . Прикладом автокутоміру такого типу є система з конічним скануванням діаграми спрямованості.
Недоліком систем з послідовним порівнянням сигналів є їхня чутливість до змін рівня сигналу, що здійснюється протягом періоду сканування і не відпрацьовується системою АРП.
Зазначені зміни, спричиняються флуктуаціями амплітуди ехосигналу і дією активних перешкод з амплітудною модуляцією, близькою по частоті до частоти сканування, знижують точність пеленгування. Цього недоліку позбавлені значною мірою системи з одночасним порівнянням сигналів, тому вони одержали найширше поширення.
У пеленгаційних системах з одночасним порівнянням сигналів, які називаються також моноімпульсними, використовується антенна система, що формує чотири окремі (парціальні) діаграми спрямованості, і багатоканальний приймач. Кутова неузгодженість визначається в результаті зіставлення одночасно прийнятих сигналів. Час виміру порівнянний з часом обробки сигналів у прийомному тракті, тобто досить мало. У моноімпульсних автопеленгаторах використовуються амплітудний, фазовий і амплітудно-фазовий методи пеленгування цілі.
Розглянемо спрощену схему амплітудного сумарно-різницевого пеленгатора, що застосовується до пеленгації в одній площині (рис. 8) У результаті підсумовування і віднімання парціальних uП1 (t) і uП2 (t) на виході антенно-хвилєводного тракту утворяться сумарний uS (t) і різницевий uD (t) сигнали. Залежність сумарної напруги uS (t) від кутового відхилення джерела сигналу визначається сумарною діаграмою спрямованості, що виражається через парціальні діаграми спрямованості співвідношенням
![]()
Аналогічно залежність різницевої напруги uD (t) визначається різницевою діаграмою спрямованості.
![]()
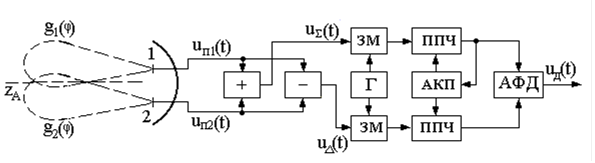 Рисунок 7 – Спрощена структурна схема амплітудного сумарно-різницевого пеленгатора
Рисунок 7 – Спрощена структурна схема амплітудного сумарно-різницевого пеленгатора
На рис. 7 " + " - суматор сигналів; " - " – обчислювач сигналів; ЗМ – змішувачі; Г – гетеродин; ППЧ – підсилювачі проміжної частоти; АРП – блок автоматичного регулювання посилення; АФД – амплітудно-фазовий детектор; " 1 " і " 2 " – випромінювачі антени; ZA рівносигнальний напрямок антени.
Форма сумарної і різницевої діаграм спрямованості показана на рис. 8 суцільними лініями. Пунктиром зображені парціальні діаграми спрямованості в одній із площин.
При зміні знака різницевої діаграми спрямованості фаза різницевої напруги змінюється на 180°.
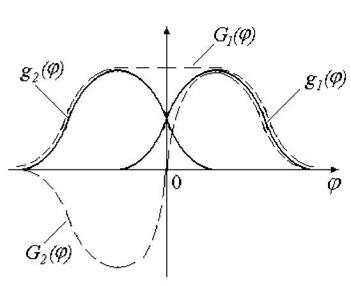
Рисунок 8 – Діаграми спрямованості
Сформовані на виході антенно-хвилєводного тракту сумарна і різницева напруга uS (t) і uD (t) надходять у відповідні канали приймального пристрою, де перетворюються по частоті, підсилюються і подаються на амплітудно-фазовий детектор.
Як видно, різницева діаграма має дискримінаційні властивості по куту. Амплітуда різницевої напруги при малих кутах неузгодженості пропорційна величині кутового відхилення, а полярність (фаза) визначається знаком цього відхилення. Тому в результаті перемножування із сумарним в АФД на його виході з'являється постійна напруга, що залежить від величини і знака кутової неузгодженості.
Неідентичність фазових і амплітудних характеристик сумарного і різницевого каналів не викликає в пеленгаторі сумарно-різницевого типу зсуву нуля пеленгаційної характеристики. У зв'язку з цим вимоги до ідентичності і стабільності приймальних каналів знижуються.
Застосування АРП, що працює по вихідній напрузі ППЧ сумарного каналу, дозволяє послабити вплив змін амплітуди сигналу на характеристики пеленгатора.
У разі відсутності перешкод і ідеальній роботі АРП пеленгаційна характеристика не залежить від амплітуди сигналів і пропорційна відношенню ![]() різницевої і сумарної діаграм спрямованості.
різницевої і сумарної діаграм спрямованості.
Після згладжування і посилення по потужності вихідна напруга АФД як керуюча підводиться до виконавчого пристрою, що переміщає дзеркало антени.
Структурна схема азимутального каналу кутомірної системи (рис. 9) містить блоки з передатними функціями WПУ (s) і WИУ (s) пеленгаційного і виконавчого пристроїв відповідно. Сигнал неузгодженості j є різниця, j=qЦ –– qZ , де qц – напрямок на ціль, qz - напрямок осі Z. Збурювання n(t) є випадковим впливом, обумовлений внутрішнім шумом радіоприймача, перелічене до кутового відхилення.
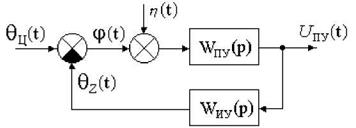
Рисунок 9 – Структурна схема кутомірної системи
4. Системи автоматичного регулювання посилення (АРП)
Призначення АРП – стиск динамічного діапазону вхідного сигналу (сягаючого значень 80 – 100 дб) до 3 – 5 дб на виході додетекторного тракту радіоприймача. Це необхідно для виключення амплітудних перекручувань, що виникають при перевантаженні радіоприймального тракту. Зокрема, система АРП стабілізує коефіцієнт передачі дискримінатора в розглянутих системах радіоавтоматики, тобто виключає залежність цього коефіцієнта від амплітуди радіосигналу на вході приймача. Ця операція називається нормуванною.
Розрізняють системи АРП "уперед" і "назад" (рис. 10).