Контрольная работа: Компоненти та функції сучасних транспортно-навігаційних глобальних інформаційних систем ГІС. Супутникові радіонавігаційні системи СРНС для менеджменту
Вступ. 3
1. Компоненти та функції сучасних транспортно-навігаційних глобальних інформаційних систем ГІС.. 4
2. Супутникові радіонавігаційні системи СРНС для менеджменту. 8
Висновки. 17
Список використаної літератури. 19
Вступ
У сучасній інфраструктурі дорожнього руху дедалі важливішу роль відіграють геоінформаційні та GPS_технології, які уже сьогодні дають можливість забезпечити безпосередніх учасників дорожнього руху та всі ланки керування транспортними системами необхідною оперативною і якісною просторово-часовою інформацією. Глобальна супутникова система позиціювання "Навстар" (NAVSTAR – Navigation Satellite Providing Time And Range) або коротко – GPS (Global Positioning System) дозволяє оперативно визначати координати місцеположення рухомих об'єктів практично в будь-якій точці земної кулі та в будь-який час, а геоінформаційні системи (ГІС) забезпечують відображення місцезнаходження об'єктів на електронних картах, моделювання та планування транспортних потоків, моніторинг стану транспортних систем в просторі та часі.
На основі GPS, ГІС, сучасних засобів зв'язку і телекомунікацій у розвинених країнах світу уже протягом декількох десятків років створюються та розвиваються інтелектуальні транспортні системи (ІТС) [1, 2]. Вони використовуються як засоби контролю і впливу на систему наземного транспорту, наприклад, менеджерів шляхом прямого керування (сигналами регулювання трафіку або опосередковано через оперативні повідомлення учасників руху про стан транспортних шляхів та їх завантаженість, у тому числі з використанням засобів мобільного зв'язку та Інтернет).
Компоненти та функції сучасних транспортно-навігаційних глобальних інформаційних систем ГІС
Бортові навігаційні комплекси призначені для GPS-навігації наземних транспортних засобів та комплектуються різними компонентами: GPS-приймач або інтегрована платформа (GPS-приймач та інерціальна система) для визначення координат місцезнаходження транспортного засобу, напрямку та швидкості його руху; бортовий мікрокомп'ютер з ГІС для програмування маршруту та інформаційного супроводження водія під час руху транспортного засобу за вибраним маршрутом; мобільні засоби зв'язку (мобільний телефон або мінірадіостанція та радіомодем) для обміну даними з диспетчерським центром або іншими сервісними службами транспортної системи тощо. У найпростішому застосуванні засобів GPS-навігації водій міжміського вантажного трейлера чи автомашина менеджеру, може, маючи мініатюрну антену та GPS_приймач з цифровим дисплеєм навігаційного приладу розміром записничка, визначати координати свого місцезнаходження з точністю до 15 м.
Інтегрування GPS-приймачів з бортовим комп'ютером, оснащеним програмними засобами геоінформаційної системи, дає можливість відображати місцезнаходження рухомих об'єктів на електронній карті, прокладати маршрут руху, постійно слідкувати за координатами рухомого об'єкта та видавати на екран дисплея або голосом рекомендації щодо можливих маневрів для оптимального руху по вибраному маршруту. На електронні карти країн Європейського Союзу, США та Канади занесено 99 % усіх вулиць і провулків, адреси, об'єкти дорожньої інфраструктури та соціально-побутового обслуговування. Автомобільні ГІС пропонують для вибору мови інтерфейсу – серед них зазвичай дві англійські (британська і США), угорська, польська (російської та української, на жаль, поки що не пропонують). Можна також вибрати голосовий супровід як на різних мовах, так і різним голосом (чоловічим або жіночим – на вибір).
Електронні карти на дисплеї бортового комп'ютера формуються як у класичному, так і в 3D-вигляді (рис. 1.1), що дуже зручно при русі на транспортних розв'язках.
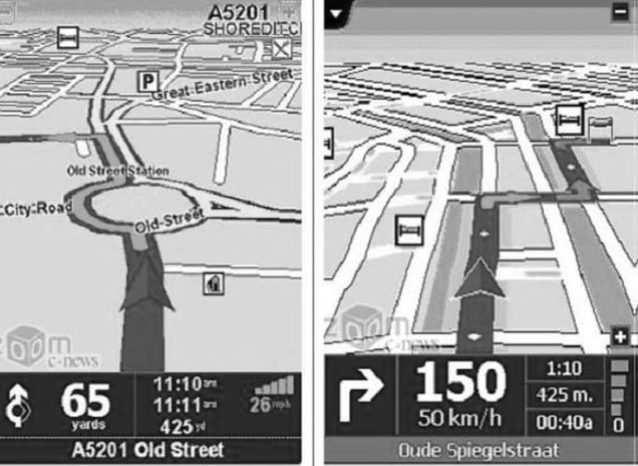
Рис. 1.1. Типові види електронних навігаційних карт на дисплеї автомобільної ГІС
Перемальовування і масштабування карт відбувається досить швидко. Доступні різнокольорові схеми дорожньої інфраструктури. Це дуже важливо, тому що в різних країнах прийняті різні системи дорожніх позначень, отже можна встановити ту схему, яка є звичною для водія, або яка найбільш оптимальна для даної країни.
ГІС автоматизує прокладання маршруту, для цього достатньо вказати кінцеву точку подорожі і ГІС негайно розрахує оптимальний шлях. При відхиленнях від маршруту (наприклад, менеджер проскочив поворот або розв'язку) система досить швидко перерахує маршрут і почне супроводжувати рух по новому маршруту. При цьому вона "не забуває" завчасно попереджати про необхідні маневри, світлофори, повороти і т. ін. Велика база геопросторових даних дає змогу шукати об'єкти як за адресою, так і за їх функціональною приналежністю. У будь-який момент можна дати команду "Navigate to " > "Point of Interest " > та вибрати потрібну адресу або один з кількох десятків категорій об'єктів, таких, як заправні станції, пункти автосервісу, готелі, лікарні, аптеки, магазини тощо. Після цього потрібно вибрати із списку пропонованих конкретний об'єкт (точку) інтересу, а ГІС виведе водія безпосередньо на потрібне місце. Програма також дає можливість отримувати з Інтернет в режимі on_line інформацію про погоду, про пробки і затори на дорогах. В цілому ж можна сказати, що навігаційні ГІС є незамінними помічниками менеджерів-автомобілістів (якщо вони подорожують по Західній Європі, США або Канаді).
Інтелектуальні транспортні системи з'явилися не так давно, але розвиток їх концепцій можна прослідкувати починаючи з 70-х років минулого століття, на які припадає період розвитку перших ІТС в Японії. У США термін "інтелектуальні транспортні магістральні системи" (Intelligent Vehicle Highway System – IVHS ), який використовувався у 1980 рр., починаючи з 1994 р. був замінений на "інтелектуальні транспортні системи" (Intelligent Transportation Systems – ITS ). У країнах Західної Європи ця предметна сфера з 1980-х років відома як "дорожньо-транспортна інформатика" (Road Transport Informatics – RTI ). Згодом з'явилося поняття "прогресивна транспортна телематика" (Advanced Transport Telematics – ATT ) (телематика – інтегровані засоби передавання та оброблення інформації для транспортних систем). У 90_х роках минулого століття вирішення проблеми ІТС набуває комплексного програмного характеру з організацією спеціальних національних та міжнародних структур, таких, як "Товариство інформації транспортних засобів, шляхів і дорожнього руху" (Vehicle , Road and Traffic Information Society – VERTIS ) в Японії, програма "ІТС_Америка" в США та Європейська організація з координації впровадження дорожньої телематики (European Road Telematics Implementation Coordination Organization – ERTICO ) у Європі. Міністерство транспорту США спонсорувало сотні проектів, спрямованих на дослідження, розробку, тестування та впровадження новітніх технологій у національній ІТС. Товариство "ІТС-Америка" об'єднує державні й місцеві органи влади, громадські спілки, університети і науково-дослідні інститути, виробників і комерційних реалізаторів автомобілів, консалтингові фірми, тощо. Міністерство спонсорує симпозіуми і конференції з питань ІТС для обміну новими ідеями і досвідом. Значна увага приділяється стандартизації засобів та протоколів обміну даними для забезпечення інтегрування всіх компонентів системи. Незважаючи на певні відмінності в стратегіях розвитку інформаційних транспортних систем Японії, країн Західної Європи та США в їх архітектурі та функціях є багато спільного. До типової можна віднести архітектуру "ІТС США", в якій виділено чотири підсистеми: перевізник, транспортний засіб, дорога та центр управління. Функціонально система забезпечує задачі планування, диспетчеризацію вантажоперевезень наземним транспортом, управління парком автомобілів, організацію руху транспорту, охорону вантажів і водіїв, захист від викрадення і повернення викрадених автомобілів, моніторинг рухомих об'єктів, тощо.
Вона зорієнтована на інформаційне забезпечення усіх суб'єктів сучасних транспортних комунікацій: власники вантажу (вантажовідправники), автотранспортні підприємства, водії, менеджери страхових компаній, екологічні та санітарні інспекції тощо. Базовою компонентою більшості систем диспетчеризації транспортом є система "автоматизованого місцезнаходження транспортного засобу – АМТЗ" (Automatic Vehicle Location – AVL ). Система АМТЗ надає можливість диспетчерському центру у реальному масштабі часу слідкувати за місцезнаходженням та графіком руху транспортних засобів, оперативно контролювати виконання завдання та при необхідності перерозподіляти їх на різних маршрутах і напрямах, надавати при необхідності технічну, медичну або іншу допомогу.
Супутникові радіонавігаційні системи СРНС для менеджменту
Інтерес до СРНС викликаний їх універсальністю. У рамках однієї системи можливе рішення великого комплексу різних задач.
Найбільш перспективними є СРНС "NAVSTAR" (США) і "ГЛОНАСС" (Росія).
На сучасному етапі інтенсивно обговорюються перспективи створення інших супутникових систем типу GPS: Глобальна європейська геостаціонарна система (EGNOSS) та GALILEO. Асоціація європейських авіакомпаній (АЕА) виправдали користь останньої системи, рахуючи EGNOSS занадто дорогою у порівнянні з її характеристиками [3].
На навколоземних орбітах знаходиться 24 штучних супутників Землі (ІСЗ) системи "NAVSTAR". Це дозволяє на протязі доби вести безперервні навігаційні визначення транспортних об’єктів, наприклад, менеджерів.
У системі "ГЛОНАСС" на навколоземних орбітах в робочому стані зі 18 ІСЗ знаходяться (за різними джерелами) від 12 до 14 ІСЗ.
В Україні, як і в країнах членах НАТО, Японії, РФ інтенсивно ведуться роботи щодо створення апаратури користувачів (АК), яка приймає сигнали СРНС "NAVSTAR" і "ГЛОНАСС" геодезичної і навігаційної точності. Апаратура СРНС може встановлюватися на різні типи рухомих об'єктів і застосовуватись в носимому варіанті.
Наведемо приклад цієї апаратури.
Мінімальна конфігурація мобільної системи картографування (МСК) складається з трьох блоків (рис.2.1): інтегрованої навігаційної платформи, стереофотограмметричної системи та блоку управління.
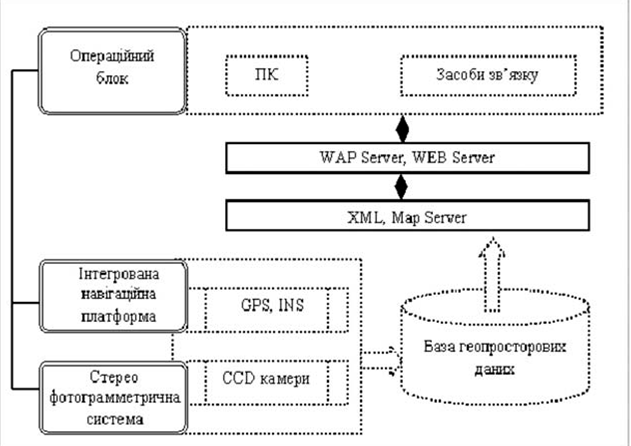
Рис.2.1.
Інтегрована навігаційна платформа забезпечує визначення глобальних координат МСК і складається з GPS-приймача та інтегрованої навігаційної системи (INS). Останнім часом GPS-координування рухомих транспортних засобів при мобільному картографуванні виконують в диференціальному режимі (DGPS) з наступним постпроцесорним обробленням або в кінематичному режимі реального часу (Real Time Kinematics – RTK ), що крім встановлення базової станції GPS вимагає організації зв'язку для передачі диференційної поправки на рухомий об'єкт. Використання такої інтегрованої платформи має багато переваг.
Стереофотограмметрична система оснащується кількома парами кольорових цифрових відеокамер (CCD-камери). Зазвичай одна пара камер орієнтується вперед по напрямку руху, інша пара камер – праворуч. Таким чином, під час руху МСК забезпечується автоматизоване стереофотограмметричне знімання об'єктів дорожньої інфраструктури. Очевидно, що знімання всіх об'єктів дорожньої інфраструктури мобільною системою картографування можливе, якщо виконати його в прямому та зворотному напрямках. Таке стереофотограмметричне знімання достатнє для визначення просторових XYZ_координат.
Блок управління мобільної системи картографування записує DGPS -вимірювання та стереопари зображень, виконаних CCD_камерами, формує базу цифрових знімків для подальшої обробки.
У табл. 2.1. приведені фірми виробники, тип і ТТХ апаратури користувачів США, РФ, України.
Потреба в оперативній високоточній навігації сухопутних, морських, повітряних об'єктів обумовила створення в 80-90-ті роки середньоорбітальних СРНС GPS "NAVSTAR" у США і ГЛОНАСС в Росії.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--