Контрольная работа: Конструкция и расчет захватного устройства
КОНСТРУКЦИЯ И РАСЧЕТ ЗАХВАТНОГО УСТРОЙСТВА
При конструировании наиболее распространенных захватных устройств (ЗУ) роботов необходимо учитывать конкретный тип детали или группы деталей, их форму, материал и условия ТП. Важные критерии при этом – необходима точность удержания детали и допустимое усилие на губках. Исходя из этого разработано большое количество разных ЗУ, которые различаются кинематической схемой и другими конструктивными параметрами.
Усилие ЗУ должно соответствовать одному из значений ряда Ra10 в пределах 1 – 8000 Н: 1,0; 1,2; 1,6; 2,0; 2,5; 3,2; 4,0; 5,0; 6,3; 8,0; 10; 12; 16; 20; 25; 32; 40; 50; 63; 80; 100; 125; 160; 200; 250; 320; 400; 500; 630; 800; 1000; 1250; 1600; 2000; 2500; 3200; 4000; 5000; 6300; 8000.
Расчет ЗУ включает нахождение сил, которые действуют в местах контакта заготовки и губок; определение усилий привода; проверку отсутствия повреждений поверхности объекта при схвате; расчет на прочность деталей устройства.
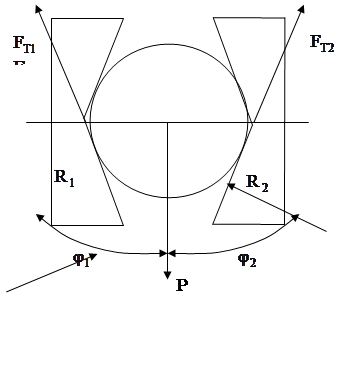 |
Рисунок 1.1 - Расчетная схема захвата
Усилие контактирования между деталью и губкой определяется по формуле
 (1.1)
(1.1)
где i, j = 1,2; i![]() j,
j,
Т.к. рассчитываемый захват симметричный, рассмотрим схему нагрузки одной из губок (см. рис. 1.2)
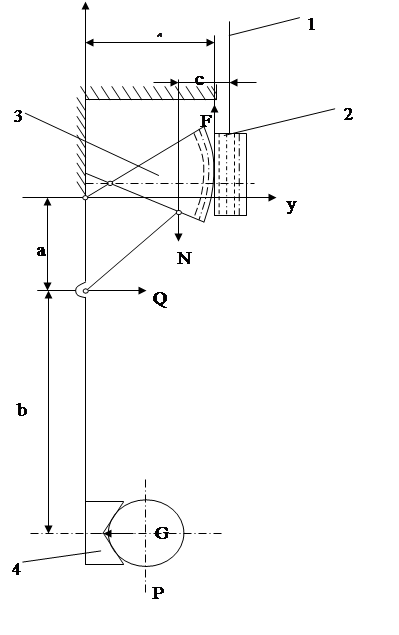 |
Рисунок 1.2 - Схема нагрузки
Рабочие губки 4 соединены тягами с зубчатыми секторами 3, которые находятся в зацеплении с рейкой 2, связанной с тягой 1 привода. При перемещении рейки 2 под действием усилия F электромагнита происходит поворот губок 4 в направлении центра на одинаковые углы и охват объекта манипулирования.
Рассчитываем усилие контактирования между объектом и губкой. Пусть объект манипулирования будет в виде цилиндра массой m = 1кг.
Реакция на одну губку захвата.
![]() (1.2)
(1.2)
где g – ускорение свободного падения.
Усиление контактирования между деталью и губкой определим по формуле (1.1).
При ![]() получим:
получим:
 (1.3)
(1.3)
Коэффициент трения для пары фторопласт – керамика 0,2.
Усилие зажима на губке схвата равно:
![]() (1.4)
(1.4)
Усилия, которые возникают в звеньях схвата при его работе, обозначены на рис. 1.2. Передаточный коэффициент механизма можно найти из условия:
![]() (1.5)
(1.5)
Для определения этой зависимости составим условия равновесия системы относительно точки А (см. рис. 1.2).


 (1.6)
(1.6)
т.е. сумма проекций всех сил на произвольно выбранные оси прямоугольных координат x,y и сумма моментов этих сил относительно точки А равняются нулю.
В нашем случае условия равновесия системы относительно точки А записуется в виде:
 (1.7)
(1.7)
Решив систему относительно G и F получим уравнение:
--> ЧИТАТЬ ПОЛНОСТЬЮ <--