Контрольная работа: Многоканальная система передачи информации
1.Преобразователи частоты
1.1 Напряжение модулятора
Экспериментальное исследование основных параметров и характеристик схем модуляторов многоканальных систем передач.
1.1 Схема простейшего модулятора
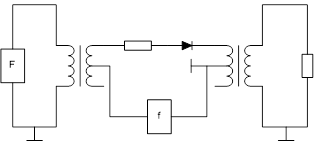
В результате передачи сигнала от F к f получаем два вида сигнала: на входе и на выходе.
1.2 Диаграмма напряжения на входе

1.3 Диаграмма напряжения на выходе
![]()
На модулятор поданы частоты F = 8 кГц и f = 64 кГц, внутренне сопротивление генераторов сигнала и сопротивление нагрузки модуляторов приняты равным 600 Ом.
Таблица 1.1
Нагрузка модуляторов
| f, кГц | Рвых, дБ |
| F = 8 | -18,37 |
| f = 64 | -5,22 |
| f + F = 72 | -21,75 |
| f – F = 56 | -22,62 |
| f – 2F = 48 | -56,55 |
| f + 2F = 80 | -56,55 |
| f – 3F = 40 | -78,30 |
| f + 3F = 88 | -78.30 |
| 3f + F = 200 | -33,05 |
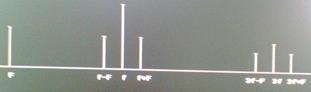
Рис 1.1
Спектральный состав тока на выходе модулятора
1.2 Рабочее затухание модулятора
Зная спектральный состав тока на выходе модулятора, а так же уровень модулирующего колебания P(F)= -3 дБ, найдем рабочее затухание модулятора.
αр = Рвх – Pвых = -3 – (-17,40)= 14,40 дБ
1.2 Схема балансного модулятора
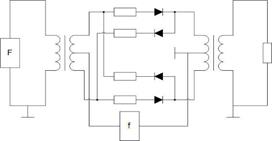
1.4 Диаграмма напряжения на входе:

1.5 Диаграмма напряжения на выходе:

2. Многоканальная система передачи информации
В цифровой системе передачи информации (СПИ) передаваемый сигнал является последовательностью М-ичных символов.
Значение каждого символа передается при помощи радиоимпульса прямоугольной формы, используя один из методов модуляции, описанных в разд. 2.8. В процессе передачи сигнала по линии эти импульсы случайным образом искажаются (обычно это происходит из-за наличия мультипликативной помехи) и появляется аддитивная помеха.
Демодулятор к моменту окончания очередного принимаемого импульса должен указать (точнее, угадать), которое из М возможных значений символа было передано с данным импульсом. Очевидно, что иногда демодулятор будет выдавать ошибочные решения, поэтому желательно применять такой способ обработки импульса, который при заданных характеристиках сигналов и помех обеспечивает минимум полной вероятности ошибки Р. Это и есть главный критерий качества приема в цифровой СПИ.[1]
Чтобы следовать этому критерию, для обработки очередного импульса нужно использовать такой алгоритм, который учитывает все сведения об ожидаемом импульсе, которые известны к данному моменту (момент прихода и длительность, несущая частота и начальная фаза, характер искажений огибающей и закон паразитной внутриимпульсной фазовой модуляции и т.п.). Это и есть априорные сведения, и чем их больше, тем меньше будет вероятность ошибок, допускаемых демодулятором, который учитывает эти сведения.
Некоторые параметры ожидаемого импульса известны с высокой точностью. Например, в канале с постоянными параметрами принимаемый сигнал повторяет по форме передаваемый, поэтому известны длительность импульса и его амплитуда. Считается, что известны также текущие значения несущей частоты и частоты повторения импульсов, но здесь многое зависит от стабильности генераторов, задающих эти частоты в передатчике, и генераторов, воспроизводящих эти же колебания в приемнике. Фактически эти генераторы играют роль часов, по которым планируется график формирования (обработки) сигнала в передатчике (приемнике). Чем выше синхронность хода часов приемника по отношению к часам передатчика, тем выше качество приема.
Те устройства приемника, которые обеспечивают условия, при которых частота и даже текущая фаза генератора несущей в приемнике с достаточной точностью совпадают с соответствующими параметрами генератора в передатчике, называются системой обеспечения когерентности. Аналогично, система тактовой синхронизации формирует в приемнике тактовые импульсы, которые с достаточной точностью указывают момент времени, когда начинается очередной принимаемый импульс (следовательно, заканчивается предыдущий).[2]