Контрольная работа: Построение годографов Михайлова при помощи пакета MATHCAD
где с – соответствующий постоянный коэффициент при определённом порядке частоты ![]() .
.
Применяя (15) к нашей задаче, получим:
![]() (16)
(16)
а также
![]() (17)
(17)
Имея данные в виде (16) и (17), приступим к вышеупомянутому алгоритму построения годографа Михайлова с помощью «MathCad».
Шаг 1. Зададим диапазон индекса i:
![]() (18)
(18)
Шаг 2. Определим исследуемый диапазон и шаг частоты ![]() (примем
(примем ![]() с частотным шагом 0,1):
с частотным шагом 0,1):
 (19)
(19)
Шаг 3. Введём вещественную ![]() (16) и мнимую
(16) и мнимую ![]() (17) части характеристического уравнения:
(17) части характеристического уравнения:
![]() (20)
(20)
и
![]() (21)
(21)
Шаг 4. При выполнении вычислений (19), (20) и (21), формируются массивы значений частоты ![]() , вещественной
, вещественной ![]() и мнимой
и мнимой ![]() частей (рис. 7).
частей (рис. 7).
Шаг 5. Имея рассчитанные массивы значений ![]() и
и ![]() , подобно предыдущему примеру, построим частотную функцию Михайлова. После определения параметров графика, получим годограф, приведенный на рис. 8.
, подобно предыдущему примеру, построим частотную функцию Михайлова. После определения параметров графика, получим годограф, приведенный на рис. 8.

Рисунок 7 – Массивы значений ![]() ,
, ![]() и
и ![]() , рассчитанные в «MathCad»
, рассчитанные в «MathCad»
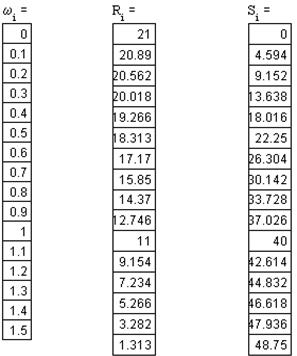
Рисунок 8 – Годограф Михайлова для САУ позиционированием НСУ
На основе анализа полученных данных, можно сделать вывод, что построенный годограф Михайлова, начинаясь на вещественной положительной оси, огибает в положительном направлении начало координат, проходя последовательно четыре квадранта, что соответствует порядку характеристического уравнения. Значит, данная САУ позиционированием НСУ – устойчива.
Что же касается анализа последних публикаций [2] и сравнения с лучшими аналогами [3], то необходимо отметить факт отсутствия подобной функции (построение годографа Михайлова) в пакете «MATLAB» [1, 4], который, обычно, используется для моделирования различных САУ, что, собственно, и послужило главной причиной создания данного алгоритма.
Перспективы развития данной работы заключаются в создании универсального инструмента для анализа комплексной частотной функции Михайлова, способного выполнить все вычисления уже на этапе задания характеристического уравнения, тем самым полностью автоматизируя этот процесс.
Таким образом, для достижения цели, в ходе написания исследования, была решена главная проблема – получение простого и наглядного инструмента для решения задач расчёта устойчивости САУ, что является обязательным условием работоспособности любого промышленного робота и манипулятора. Также были выполнены следующие задачи: сформирован алгоритм построения комплексной частотной функции Михайлова при помощи математического пакета «MathCad», выполнен анализ устойчивости САУ МПР по данному критерию, кроме того, – приведены практические примеры реализации данного алгоритма.
Список использованной литературы
1. Дорф Р. Современные системы управления / Р. Дорф, Р. Бишоп. – М.: Лаборатория Базовых Знаний, 2002. – 832 с.
2. Юревич Е.И. Основы робототехники 2-е издание / Е.И. Юревич. – С-Пб.: БХВ-Петербург, 2005. – 416 с.
3. Yim Y. Modular Robots / Y. Yim, Y. Zhang, D. Daff // IEEE SPECTRUM. – 2002. – # 2. – P. 30 – 34.
4. Олссон Г. Цифровые системы автоматизации и управления / Г. Олссон, Дж. Пиани. – С-Пб.: Невский Диалект, 2001. – 557 с.