Контрольная работа: Проектирование линейных стационарных САУ с микропроцессорными регуляторами
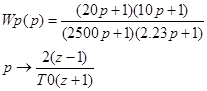
Определим передаточную функцию корректирующего устройства
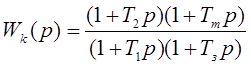
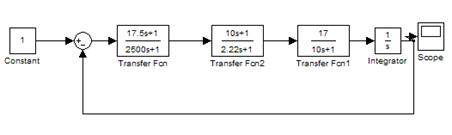
Передаточная функция замкнутой системы имеет вид:

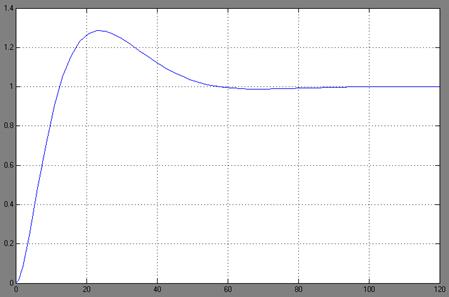
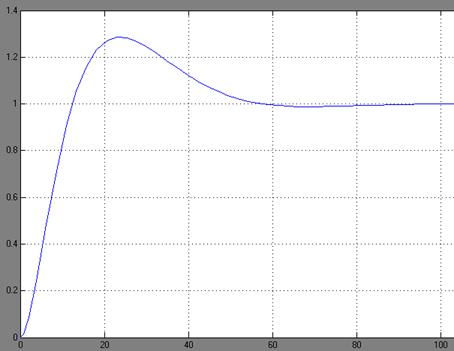
Получим переходный процесс в системе моделированием её на ЭВМ.
Переходный процесс в линейной САУ
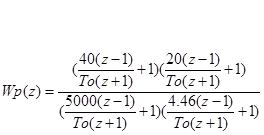
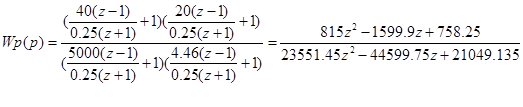
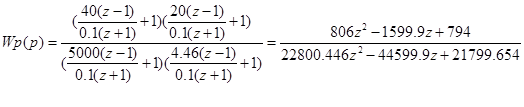
Определение дискретной передаточной функции корректирующего звена.
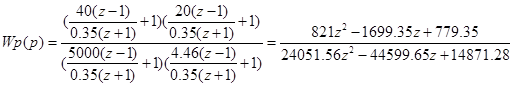
При T0 = 0.35
При T0 = 0.25
При T0 = 0.1
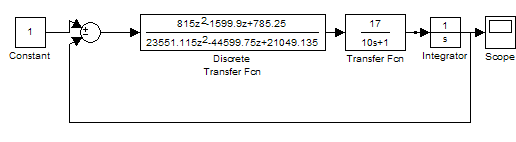
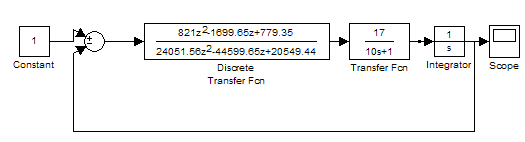
Для моделирования САУ в пакете "ДИСПАС" соответствующее уравнение имеет вид:

Переходный процесс в дискретной САУ при шаге квантования
Т=0.35
Схема моделирования при Т0=0.35
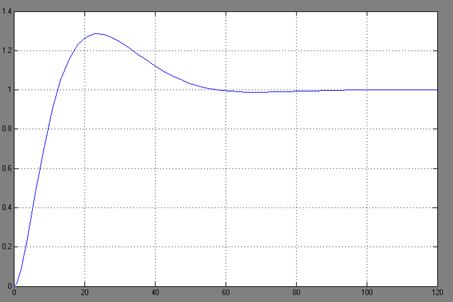
Переходный процесс в дискретной САУ при шаге квантования
Т=0.25
Схема моделирования при Т0=0.25