Контрольная работа: Роботизированные технологические комплексы (РТК) в гибкой автоматизации производства
В зависимости от серийности производства, в котором используется РТК с групповым обслуживанием оборудования, для такого комплекса могут быть применены различные организационные формы загрузки основного технологического оборудования от независимой работы каждого станка, до превращения РТК в поточную линию.
Однако для обеспечения необходимой гибкости производства в РТК с групповым обслуживанием ПР необходимо предусматривать создание межоперационных заделов, обеспечение возможности пропуска отдельных операций на некоторых типах деталей, изменения порядка обработки и т.п.
С помощью ПР должна решаться и задача независимой доставки деталей к станкам и их межстаночного транспортирования.
Индивидуальное выполнение основных технологических операций, таких как сварка, окраска, сборка и т.п., осуществляется технологическим или универсальным ПР, на базе которого организуется РТК, включающий различного рода вспомогательные, транспортные, ориентирующие устройства и механизмы, работа которых контролируется системой программного управления робота.
 а
а 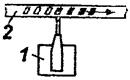 б
б
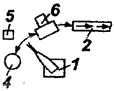
Выполнение одним роботом законченной технологической операции (перехода). а - Перенос и обработку деталей осуществляет робот за счет смены захватов и инструмента на позиции 6; б - Транспортирование детали осуществляется конвейером, управляемым СПУ робота
Групповое использование ПР для выполнения основных технологических операций подразумевает применение роботов разных типов (вспомогательных, технологических и универсальных), связанных в единый комплекс, обеспечивающий законченный технологический процесс.
 а
а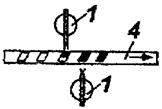 б
б
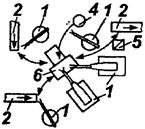
Выполнение группой роботов заключительной технологической операции (перехода)
а - Группа роботов различного технологического назначения выполняет операцию на одной позиции 6;
б - Группа роботов одного технологического назначения выполняет законченную операцию.
Примечание. На схемах обозначено: 1 - ПР; 2 - конвейер; 3 - основное технологическое оборудование; 4 - магазин с заготовками, деталями или инструментом; 5 - вспомогательные устройства, расширяющие функции робота (устройства контроля, измерения и т.п.); 6 - вспомогательные устройства ориентации или фиксации деталей.
Список литературы
1. Роботизированные технологические комплексы / Г.И. Костюк, О.О. Баранов, И.Г. Левченко, В.А. Фадеев - Учеб. Пособие. - Харьков. Нац. аэрокосмический университет "ХАИ", 2003. - 214с.
2. Н.П. Меткин, М.С. Лапин, С.А. Клейменов, В.М. Критський. Гибкие производственные системы. - М.: Издательство стандартов, 1989. - 309с.
3. Гибкие производственные комплексы / под. ред. П.Н. Белянина. - М.: Машиностроение, 1984. - 384с.
4. Гибкое автоматическое производство/под. ред. С.А. Майорова. - М.: Машиностроение, 1985. - 456с.
5. Иванов А.А. ГПС в приборостроении. - М.: Машиностроение, 1988. - 282с.
6. Управление робототехническими системами и гибкими автоматизированными производствами / под. ред. Н.М. Макарова, - М.: Радио и связь, 1981, ч.3 - 156с.
7. Широков А.Г. Склады в ГПС. - М.: Машиностроение, 1988. - 216с.