Контрольная работа: Розробка мікроконтролерного пристрою на базі МК РІС 16С5х
3.1. Організація циклу формування дискретного сигналу
3.2. Організація затримки
2.2. Вибір способу реалізації кожної з підзадач (апаратний або програмний)
Усі МКП розробляються за допомогою програмних і апаратних способів реалізації.
Переваги апаратної реалізації полягають у тім, що:
а) використання спеціальних БІС спрощує розробку і забезпечує високу швидкодію системи в цілому;
б) зменшується час на розробку і налагодження пристрою.
Переваги програмної реалізації такі:
а) менша вартість і споживана потужність системи;
б) менша кількість компонентів у системі, а значить вище надійність системи в цілому;
в) час життя системи значно вище в порівнянні з апаратною реалізацією;
г) можливість простої модифікації системи (шляхом перепрограмування).
Вибір певного способу реалізації залежить від конкретної задачі і вимог, які ставляться в ТЗ, з метою максимально раціонального використання можливостей, що надає МК. Хоча існують підзадачі, вирішення яких можливе лише апаратним або навпаки лише програмним засобом, інші – апаратно-програмним, раціональне поєднання всіх способів – задача проектувальника.
За технічним завданням рівні вхідних сигналів відповідають ТТЛ логіці, тобто немає потреби використовувати яких не-будь архітектурних рішень для узгодження сигналів із архітектурою МК.
Технічне завдання вимагає організацію внутрішнього RC-генератору і внутрішнього сигналу "Скидання" по ввімкненню живлення. Ці задачі будуть вирішені апаратним способом, оскільки це найлегший і ефективний спосіб для вирішення цих задач, і розглянуті під час розробки структурної схеми МК.
Інші задачі організації процедури чекання події, аналізу станів датчика, видачі керуючої послідовності сигналів на об'єкт керування (організація циклу формування дискретного сигналу, організація затримки) будуть реалізовані програмним способом оскільки ТЗ не накладає жорстких обмежень на швидкодію системи, період слідування керуючих сигналів більше tц контролера, а деякі задачі нижнього рівня, як читання стану порту вводу МК, або запис даних в пам'ять МК можливо реалізувати лише програмним способом. Крім того вимога створення мікроконтролерного пристрою, ставить саме за мету використання програмних можливостей МК для вирішення цих задач. Їх реалізація буде розглянута підчас розробки загального алгоритму роботи МКП і тексту програми.
2.3. Обґрунтування вибору ОМК для вирішення задачі
Для рішення даної задачі необхідний МК, що містить у собі наступні характеристики відповідно до ТЗ:
1) має 2 лінії вводу/виводу (1 – вхідні дані і 1 – вихідні дані);
2) має внутрішній RC генератор;
3) має в наявності ПЗП;
4) не обов’язково включає додаткових функціональних вузлів (АЦП, ЦАП, ШИМ, USART і т.д.);
5) буде доступним і порівняно недорогим;
6) згідно із ТЗ має бути із серії МК РІС 16С5х
Ще одним немаловажним моментом є наявність документації на МК, щоб правильно його запрограмувати.
Визначеним вимогам відповідає велика кількість МК, тому керуючись критерієм максимальної доступності і дешевизни, а також тим, що програма буде невеликої складності і може бути відлагоджена на етапі розробки програмними засобами, а також немає потреби перепрограмовувати МК в подальшому, вибираємо МК РІС 16С54, як той що найбільш відповідає визначеним вимогам.
3 ФУНКЦІОНАЛЬНА СХЕМА ПРИСТРОЮ І ЇЇ КОРОТКИЙ ОПИС
Згідно із визначеними вимогами щодо структури МК, апаратними рішеннями отримали наступну функціональну схему пристрою, зображену на рисунку 3.1.
Біт стану з датчика поступає на вхід RB0, за технічним завданням сигнали з датчика відповідають рівням ТТЛ логіки, тому не має потреби приймати якихось конструктивних рішень, щодо узгодження сигналів з датчика і входом RB0, а подавати напряму, що зображено на рисунку 3.1
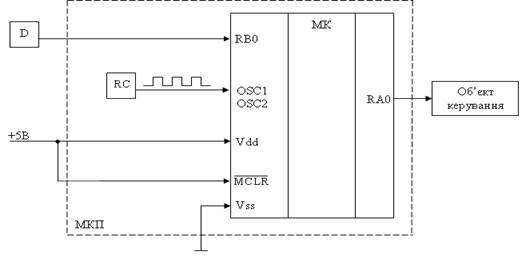
Рис. 3.1 Функціональна схема МКП
В схемі використано внутрішній RС генератор. Ним треба керувати шляхом підключення зовнішнього, по відношенню до контролера, RC-ланцюга (рис. 3.2).