Контрольная работа: Управляющие устройства и их виды
Для исп. понятий автоматов при постр. устр. упр. необходимо выделить состояния устр. упр., а также усл. перехода из 1 сост. в др. Для автомата Мура, в кач. состояний исп. события генерации (возникновение соотв. сигналов упр.).
Некоторые сост. могут порождать в т. сл. формирование нескольких сигналов упр. После этого усл. перехода из сост. в сост. будут иметь значения соотв. осведомит. сигналов.
В т. сл. для хранения инф. о тек. сост. автомата упр. можно исп. набор триггеров, кол-во кот. k=lnr, r – кол-во состояний.
Иными словами мыпронумеруем все сост. и сопоставим всем сост. некоторый 2-й код, соотв. данному сост. Зная порождаемые сигналы упр. каждым сост., можно, исп. логическую схему «или» и дешифратор состояния, обеспечить формир-е требуемых сигналов упр.
Автомат Мили требует меньшего кол-ва триггеров для отобр. состояний, т.к. описывается меньшим кол-ом состояний, но его недостаток – изменение состояния происходит при изм. освед. сигн., что может повлеч изм. упр. сигн., кот. будут преждевременными для текущей выполняемой команды.
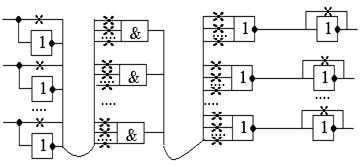
Поэтому аппарат Мили применяют со схемами задержки, либо в комбинации: Мура – Мили. Для построения устр. упр. с ж. л. исп. программируемые логические матрицы, которые содержат слой входных инверторов, слой эл-ов «и», слой эл-ов «или» и слой вых. инверторов. Крестики – возможность разорвать соотв. цепь в процессе программирования матрицы.
Матрица образована т.о., что на любой эл-т «и» м.б. поданы все знач. прямых и инвертных входных сигн. На вход любого эл-та «или» м.б. поданы выходы любого эл-та «и».
МПУУ – требуемый набор управляющих сигналов сохраняется в т.н. «микропрограммной памяти» с доступом только для чтения (read-only).
Каждый набор таких сигналов соответствует некоторой микрооперации и представлен в виде микрокоманд.
В соответствии с логикой выполнения операции каждая микрокоманда в микропрограмме определяет (содержит) адрес следующей микрокоманды, необходимой для выполнения операции.
МПУУ функционируют с использованием доступа к МП-памяти, поэтому их применение стало оправданным лишь с появлением быстрых модулей памяти.
Основное достоинство МПУУ – возможность модернизации процессора или замены множества выполняемых операций путём перехода к новым модулям МП-памяти.
Т.к. МП-память входит в состав процессора в виде компонента УУ, то данное преимущество даёт возможность автоматизированного и автоматического проектирования компонент УУ и микропроцессора в целом.
Для выработки управляющих сигналов используются следующие обозначения:
1. каждый управляющий сигнал соответствует некоторой операции, реализуемой операционным блоком. Пусть V1 …Vm – совокупность управляющих сигналов, причём Vi инициирует выполнение соответствующей микрооперации.
2. При выработке управляющих сигналов используются U1 …Un – значения «осведомительных сигналов» о результатах выполнения предыдущей операции, а также о состоянии компонент операционного устройства.
3. УУ может находиться в одном из состояний множества
Q={Q1 ,Q2 ,…,QL }
4. Множество выполняемых операций y1 …ys
УУ можно представить некоторым конечным автоматом, соответствующим логике автомата Мура или автомата Мили.
Переход в новое состояние для автомата Мура определяется некоей функцией А от текущего состояний, выполняемой операции и значения.
Q(t+1)=A(Q(t),yi ,u1 …un )
вых. сигналы:
V1 =F1 (Q(t),yi ), V2 =F2 (Q(t),yi ), …Vm =Fm (Q(t),yi )
Т.о. значения управляющих сигналов при построении УУ как автомата Мура, зависят только от состояния УУ.
При построении УУ как автомата Мили, выработка управляющих сигналов зависит также от значений «осведомительных сигналов»
V1 =f1 (Q(t),yi ,u1 …un ), V2 =f2 (Q(t),yi ,u1 …un ), …Vm =fm (Q(t),yi ,u1 …un )
Построение автомата Мура требует большего использования компонент для отражения состояния автомата (памяти).