Курсовая работа: Анализ и синтез механизмов технологического оборудования машиностроения
1.3.4 Построение плана ускорений
Построение плана ускорений выполняем для 3 и 9 положений звеньев механизма.
Ускорение точки A определяется по формуле:
![]()
Вектор ускорения точки A направлен параллельно ведущему звену 1 к центру его вращения, т.к. угловая скорость ![]() есть величина постоянная, угловое ускорение звена 1 равно нулю, тангенциальная составляющая ускорения равна нулю, и ускорение
есть величина постоянная, угловое ускорение звена 1 равно нулю, тангенциальная составляющая ускорения равна нулю, и ускорение ![]() - нормальное ускорение.
- нормальное ускорение.
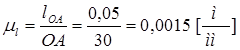
Масштабный коэффициент для построения плана ускорений определяется по формуле:

Для определения ускорений точек B, C и D составляем системы векторных уравнений:
![]()
 ,
,
![]()
 .
.
Рассмотрим вектора в каждой системе уравнений.
Нормальные ускорения определяются по формулам:
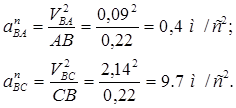
Вектор нормального ускорения направлен параллельно соответствующему звену к центру его вращения.
Кориолисово ускорение ![]() равно нулю, т.к. стойка неподвижна. Ускорение
равно нулю, т.к. стойка неподвижна. Ускорение ![]() также равно нулю, т.к. угловая скорость направляющей равна нулю.
также равно нулю, т.к. угловая скорость направляющей равна нулю.
Построение плана ускорений выполняем в следующей последовательности: из полюса ![]() откладываем вектор ускорения точки A в виде отрезка
откладываем вектор ускорения точки A в виде отрезка ![]() длиной 251 мм. Вектор нормального ускорения
длиной 251 мм. Вектор нормального ускорения ![]() откладываем из конца вектора ускорения точки A. Вектор ускорения точки С (оно равно нулю) откладываем в полюсе. Вектор нормального ускорения
откладываем из конца вектора ускорения точки A. Вектор ускорения точки С (оно равно нулю) откладываем в полюсе. Вектор нормального ускорения ![]() откладываем из полюса как из конца вектора ускорения точки С. Через концы векторов ускорений
откладываем из полюса как из конца вектора ускорения точки С. Через концы векторов ускорений ![]() и
и ![]() проводим направления векторов ускорений
проводим направления векторов ускорений ![]() и
и ![]() . Точка пересечения этих линий даст нам вектор абсолютного ускорения точки B.
. Точка пересечения этих линий даст нам вектор абсолютного ускорения точки B.
Аналогично строим план по второму и третьему уравнениям
Ускорение точки D3 определяем из пропорции:
![]() ,
, ![]() .
.
Результаты расчетов сводим в таблицу 4.
Таблица 4
| Значение ускорений точек механизма, м/c2 | |||||||||
| № | |||||||||
| 3 | 15.6 | 10.8 | 6.3 | 54.9 | 55.2 | 12.6 | 6 | 19.5 | 3.3 |
| 9 | 12.6 | 8.7 | 5,1 | 35.7 | 37.6 | 8.7 | 6.9 | 27.3 | 2.7 |
1.3.5 Определение угловых ускорений звеньев
Угловое ускорение первого звена равно нулю, т.к. кривошип вращается равномерно.
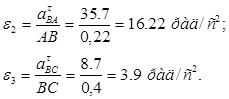
Угловые ускорения звеньев AB и CD для третьего положения звеньев механизма определяются по формулам:
2. Силовой (кинетостатический) расчет механизма
2.1 Определение реакций в кинематических парах
Исследование механизма производим для 3-его положения звеньев механизма. Для этого вычерчиваем кинематическую схему механизма в заданном положении и расчленяем ее на группы Ассура.
Масштабный коэффициент кинематической схемы определяется по формуле: