Курсовая работа: Автоматизация судовых паротурбинных установок
Если уравнение (1) разделить на коэффициент самовыравнивания z, то получится представляющее собой классическую форму записи дифференциального уравнения:
![]() , (4)
, (4)
где ![]() - постоянная времени объекта регулирования, с;
- постоянная времени объекта регулирования, с;
![]() - коэффициент усиления объекта.
- коэффициент усиления объекта.
6. Определение коэффициентов уравнения динамики объекта регулирования
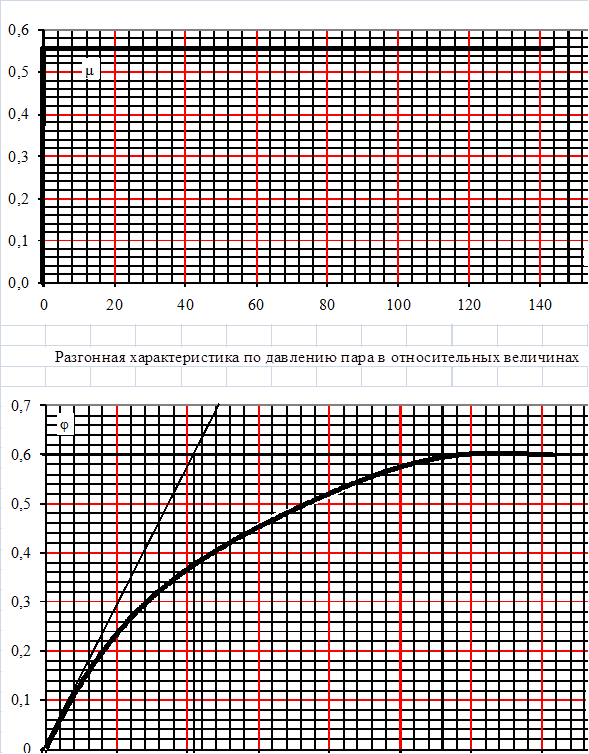
Существует два метода определения коэффициентов уравнения динамики объекта регулирования: аналитический и графоаналитический. Первый из них связан с определением конструктивных и теплотехнических характеристик, что порой бывает порой затруднительно в судовых условиях и к тому же требует много времени на обработку полученных данных. Второй метод более прижился в инженерной практике, прост в использовании и экономный во времени. Заключается он в снятии разгонной характеристики по каналу регулирования путём нанесения ступенчатого возмущения на объект регулирования. При съёме разгонной характеристики систему автоматического регулирования размыкают, т. е. объект отсоединяют от регулятора. Возмущение обычно наносится регулирующим органом (РО), в данной курсовой работе роль регулирующего органа выполняет регулирующий топливный клапан, путём изменения его положения на небольшую величину. Эта величина возмущения выбирается так, чтобы изменение выходного параметра не выходило за технологически допустимую величину. В нашем случае величина возмущающего воздействия (ступенчатого открытия топливного клапана) составляет:
![]()
Если объект является неустойчивым или нейтральным, то снимают часть разгонной характеристики с допустимыми отклонениями выходной величины. Для регистрации величины отклонения регулируемого параметра используют безинерционные точные измерительные приборы, самописцы, шлейфовые или запоминающие осциллографы. При ручной регистрации разгонной характеристики снимают показания измерительного прибора через равные промежутки времени ∆t. По заданию курсовой работы:
∆t = 13 с.
Для определения постоянной времени объекта регулирования на разгонной характеристике проводим из точки начала координат касательную к кривой. Доведя касательную до уровня (линии) установившегося состояния, получаем точку пересечения. Из этой точки к оси времени проводим перпендикуляр. Расстояние от начала кривой разгонной характеристики до точки пересечения перпендикуляра с осью времени будет постоянной времени, величина которого в нашем варианте имеет вид:
![]() = 42 с.
= 42 с.
С разгонной характеристики также определяем
![]() = 0,6
= 0,6
![]() = 0,557
= 0,557
Отсюда по известной формуле определяем коэффициент усиления объекта
![]()
С учётом выше написанного запишем типовое уравнение динамики котла как объекта регулирования по давлению пара:
![]()
Переходная характеристика объекта регулирования
ВТОРОЙ РАЗДЕЛ
1. Выбор регулятора. Принципиальная, функциональная и структурная схемы регулятора. Устройство и принцип действия регулятора и его элементов
Основная регулируемая величина — давление пара, которая характеризует баланс между производимым паром в котле и потребляемым. Нарушение этого баланса сопровождается отклонением давления, которое измеряется регулятором давления пара, изменяющим через исполнительный орган подачу топлива в топку и восстанавливающим тем самым нарушенный тепловой баланс.
Основные требования к регулятору давления пара могут быть сформулированы следующим образом:
-отклонение давление пара в точке отбора импульса на регулятор должно составлять ±0.05 МПа;
-в переходных режимах падение давления пара не должно превышать 10% номинального при изменении нагрузки котла от минимальной до максимальной за период не менее 60с;
-допускается повышение давления пара, не приводящее к подрыву предохранительных клапанов при изменении нагрузки котла от максимальной до минимальной за время не менее 30с;
-давление пара в указанных пределах должно поддерживаться при изменениях расхода пара со скоростью не более 1.5% в секунду (при повышении нагрузки) и 3% в секунду (при снижении нагрузки).
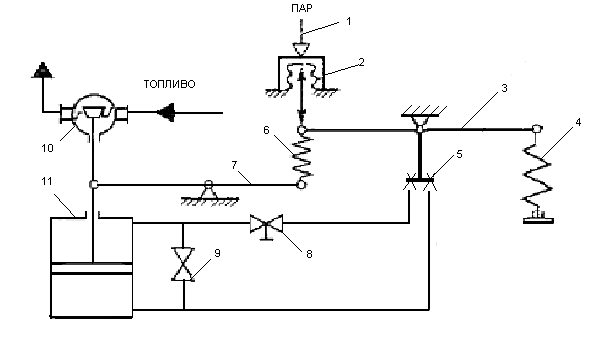
Рис. 2.1.1. Принципиальная схема П-регулятора давления пара
Котел обладает малым самовыравниванием по давлению пара, поэтому регуляторы давления пара должны обязательно иметь стабилизирующие элементы. Для регулирования давления пара обычно применяют 1- и 2-импульсные П-регуляторы, а также ПИ-регуляторы.
Для судов отечественной постройки типичен гидравлический П-регулятор давления пара с жесткой обратной связью (рис.2.1). Регулятор измеряет давление в паропроводе посредством сильфона 2, к которому подведен импульсный трубопровод 1. В установившемся режиме усилие от сильфона уравновешивается натяжениями задающей пружины 4 и пружины обратной связи 6, заслонка водяного усилительного реле 5 (к нему подведена вода под давлением) находится в среднем положении, и поршень ИМ 10 неподвижен. При отклонении давления пара от заданного равновесие нарушается, новое усилие сильфона 2 на рычаг 3 приводит к отклонению заслонки регулирующего реле 5 и подаче воды в одну из полостей ИМ 10; в результате его поршень перемещается и изменяет степень открытия регулирующего подачу топлива клапана 11, оказывая регулирующее воздействие на давление пара в котле. Одновременно шток клапана 11 через рычаг 7 и пружину обратной связи 6 оказывает выключающее воздействие на усилительное реле 5. Дроссельный клапан 8 предназначен ?