Курсовая работа: Электропривод фрикционного бездискового пресса
Введение
Анализ и описание системы «электропривод – рабочая машина»
Анализ и описание системы "электропривод – сеть" и "электропривод – оператор"
Выбор принципиальных решений
Расчет силового электропривода
Расчет статических механических и электромеханических характеристик двигателя и привода
Расчет переходных процессов в электроприводе за цикл работы
Проверка правильности расчета мощности и окончательный выбор двигателя
Заключение
Список использованных источников
Введение
Целью данного курсового проекта является разработка электропривода фрикционного бездискового пресса. В процессе проектирования планируется овладеть базовыми понятиями по дисциплине Теория электропривода. Требуется рассчитать и выбрать двигатель привода, рассчитать механические характеристики электропривода, рассчитать и построить переходные процессы основных режимов работы, проверить двигатель по нагреву и др.
1. Анализ и описание системы «электропривод – рабочая машина»
Механизм бездискового пресса приводится в действие от асинхронного короткозамкнутого электродвигателя. Средняя продолжительность включения пресса ПВ, сила давления пресса P, вес поступательно движущихся частей (ползуна, гайки) G, максимальный ход ползуна L, ход ползуна за один оборот маховика l, передаточное отношение от вала двигателя к шпинделю при холостом ходе i0 , при рабочем ходе iР .
Движение ползуна вниз происходит с увеличенной скоростью, вверх – замедленно. Изменение статического момента на валу двигателя за цикл работы пресса и изменение скорости вращения маховика приведены на рисунке 1.1.
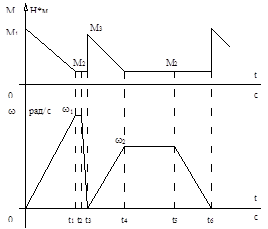
Рисунок 1.1 – Упрощенная тахограмма.
Дальнейшее уточнение тахограммы будет произведено при построении нагрузочных диаграмм.
Рабочий цикл состоит из:
(t0 – t1 ) – разгон маховика до скорости w1 ;
(t1 – t2 ) – двигатель отключен от маховика и нагружен только моментом холостого хода;
(t2 – t3 ) – брикетирование за счет энергии маховика, отдав всю энергию, маховик останавливается;
(t3 – t4 ) – разгон маховика в обратную сторону до скорости w2 , ползун поднимается вверх;
(t4 – t5 ) – двигатель поддерживает скорость вращения маховика постоянной и равной w2 ;
(t5 – t6 ) – двигатель продолжает вращаться на холостом ходу, маховик затормаживается механическим тормозом и останавливается.
Составим расчетную схему механической части электропривода. Кинематическая схема привода изображена на рисунке 1.2.
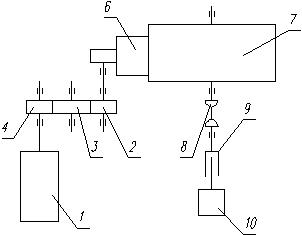
Рисунок 1.2 – Расчетная схема электропривода – для режима рабочего хода.
На рисунке 1.2 сделаны следующие обозначения:
1. – двигатель;
2. – зубчатое колесо рабочего хода;
--> ЧИТАТЬ ПОЛНОСТЬЮ <--