Курсовая работа: Использование компенсаторов в геодезии
1. корпус трубы,
2. призма, жестко соединенная с корпусом трубы,
3. призма, подвешенная на нитях,
4. нити подвеса призмы,
5. центр тяжести системы,
6. демпфер.
С помощью этих призм изображение рейки передается в плоскость сетки нитей по горизонтальному направлению (S - S) при небольшом наклоне трубы; диапазон компенсируемых углов наклона 7+15', ошибка горизонтальности визирной линии трубы - не больше 0.5"; систематическая ошибка недокомпенсации - не более 0.3" на 1' наклона трубы; время затухания колебаний - не более 2 секунд.
Широкое применение находят геодезические приборы, в которых уровень заменен автоматическим устройством — компенсатором наклона. В теодолитах это компенсатор наклона индекса вертикального лимба, в нивелирах — компенсатор наклона визирной линии. Начальная установка прибора может проводиться грубо, поэтому компенсаторы наклона позволяют повысить производительность работ и в диапазоне± 10' и более обеспечить необходимую точность установки (чувствительность компенсаторов доходит до 0,2").
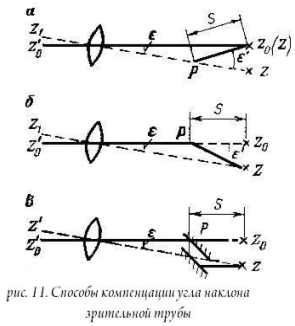
Наибольшее распространение получили маятниковые компенсаторы. Компенсировать угол наклона ε зрительной трубы можно различными способами:
1) переместить сетку нитей из положения Z в положение ![]() ; соответствующее горизонтальному направлению визирной линии;
; соответствующее горизонтальному направлению визирной линии;
2) изменить направление горизонтального луча визирования таким образом, чтобы он прошел через горизонтальную нить Z смещенной сетки;
3) осуществить параллельное смещение горизонтального луча визирования на величину ![]() , при котором луч пройдет через горизонтальную нить смещенной сетки.
, при котором луч пройдет через горизонтальную нить смещенной сетки.
Компенсацию угла наклона зрительной трубы можно осуществить механическим, оптическим или оптико-механическим способами. Примером механического компенсатора является подвешенный на трех стальных нитях диск с сеткой нитей, представляющий собой физический маятник. Основное уравнение компенсации имеет вид: ![]() , f - эквивалентное фокусное расстояние объектива зрительной трубы; S - длина рычага маятника, несущего сетку нитей (длина нитей подвески маятника). Отношение
, f - эквивалентное фокусное расстояние объектива зрительной трубы; S - длина рычага маятника, несущего сетку нитей (длина нитей подвески маятника). Отношение ![]() называется угловым увеличением компенсатора. В приведенном примере S = f и п=1.
называется угловым увеличением компенсатора. В приведенном примере S = f и п=1.
Широкое распространение в нивелирах получили оптико-механические компенсаторы. Чувствительный элемент компенсатора представляет собой оптическую деталь (или систему оптических деталей), подвешенную с помощью какой-либо системы подвески. Такими компенсаторами являются компенсаторы с поворотом визирного луча и компенсаторы с параллельным смещением визирного луча.
Оптико-механические компенсаторы характеризуются коэффициентами механической ![]() и оптической
и оптической ![]() компенсации.
компенсации.
Наклон основания маятника, жестко соединенного со зрительной трубой, на угол ε вызывает отклонение его чувствительного элемента от первоначального положения на угол ε ``, величина которого зависит только от механических связей основания маятника с подвижной частью подвески и от свойств материала подвески. Отношение ε``: ε называется коэффициентом механической компенсации KM. Величина KM зависит от выбранного типа подвески и определяется ее параметрами.
Отклонение чувствительного элемента маятника на угол ![]() приводит к изменению ориентации оптической детали относительно направления визирования, при этом оптическая деталь изменяет первоначальное направление линии визирования на угол
приводит к изменению ориентации оптической детали относительно направления визирования, при этом оптическая деталь изменяет первоначальное направление линии визирования на угол ![]() , величина которого зависит от оптических свойств подвешенной детали. Коэффициент компенсации, обусловленный действием оптических свойств подвешенной детали, называется оптическим коэффициентом компенсации
, величина которого зависит от оптических свойств подвешенной детали. Коэффициент компенсации, обусловленный действием оптических свойств подвешенной детали, называется оптическим коэффициентом компенсации ![]() . Величина
. Величина ![]() , зависит от вида и параметров оптической детали.
, зависит от вида и параметров оптической детали.
Общий коэффициент компенсации К обусловлен действием механических связей и оптических свойств деталей.
В компенсаторах с поворотом визирного луча в качестве чувствительных элементов широко используются подвешенные отражающие поверхности. В случае одного подвешенного зеркала ![]() .
.
Общий коэффициент компенсации К для системы компенсации, состоящей из п подвижных и т неподвижных зеркал при нечетном числе отражений, определяют по формуле: ![]() .При наличии точек системы с четным числом отражений от неподвижных и подвижных зеркал формула для К имеет вид:
.При наличии точек системы с четным числом отражений от неподвижных и подвижных зеркал формула для К имеет вид: ![]() .
.
Для поворота визирного луча в компенсаторах применяют также подвешенные линзы.
При наклоне компенсатора на угол линза наклоняется на угол ![]() , при этом угол падения φ визирного луча на линзу составит
, при этом угол падения φ визирного луча на линзу составит ![]() , а угол
, а угол ![]() , на который отклонится луч линзой
, на который отклонится луч линзой ![]() . Полный коэффициент компенсации определяется формулой:
. Полный коэффициент компенсации определяется формулой: ![]() .
.
Угол ε`отклонение луча линзой при угле падения φ луча на линзу зависит от типа и параметров линзы. Для линзы типа менаска толщиной d, обращенного к падающему лучу выпуклой стороной, имеющему радиусы кривизны r1 и r2 и показатель преломления n:

В практике применяют большое разнообразие подвесок маятниковых компенсаторов. Наиболее простым видом подвески является физический маятник, положение которого не меняется при наклоне базы. На точность установки такого маятника в отвесное положение влияют силы трения в опорах оси вращения маятника, которые должны быть минимальными. Лучшие результаты дают подвески с опорами на центрах, на кернах, на ножевой опоре, а также магнитная подвеска. Применяют упругие подвески на эластичной пружине, торсионные подвески на упругой закрученной нити или ленточке, но наиболее распространенным видом подвесок является подвеска на тонких металлических нитях. Существуют несколько схем подвесок оптической детали компенсатора на нитях – подвеска на параллельных нитях, на скрещивающихся нитях, на нитях в форме трапеции.
Для успокоения собственных свободных колебаний чувствительного элемента компенсаторов применяются устройства, которые называются успокоителями или демпферами. В качестве успокоителей колебаний обычно применяют воздушные или электромагнитные демпферы.
При расчете демпфера исходными параметрами являются: диапазон работы компенсатора ![]() ; порог чувствительности маятника δ; время успокоения
; порог чувствительности маятника δ; время успокоения ![]() маятника (время успокоения регламентируется по ГОСТ 10528-76 и не должно превышать 2 с.).
маятника (время успокоения регламентируется по ГОСТ 10528-76 и не должно превышать 2 с.).
4. Исследование компенсаторов