Курсовая работа: Использование ЛЧМ сигналов при построении приемника радиолокационной станции сопровождения
Канал поиска предназначен для управления антенной при обзоре заданной зоны пространства.
Канал углового сопровождения предназначен для:
-автоматического сопровождения цели по угловым координатам;
-инерционного сопровождения цели;
-сопровождения цели в режиме ТОВ;
-ручного управления антенной.
Канал сопровождения низколетящих целей (НЛЦ) предназначен для сопровождения целей, летящих на малых высотах, при влиянии сигнала зеркального отражения цели от земли ("антипода") на работу угловой автоматики.
Канал управления телевизионным оптическим визиром (ТОВ) предназначен для ручного и полуавтоматического сопровождения цели.
Система встроенного контроля предназначена для:
-оперативного контроля;
-контроля функционирования систем РЛС;
-диагностического контроля, обеспечивающего отыскание неисправности с точностью до конструктивно-съемного блока или узла.
Система защиты от помех обеспечивает выполнение боевой задачи в условиях организованного радиопротиводействия.
Система питания предназначена для питания системы РЛС.
1.5 Работа РЛС 9 S 35М1 по структурной схеме
РЛС представляет собой устройство (Рис.1), работающее в двух режимах:
-импульсном;
-квазинепрерывном.
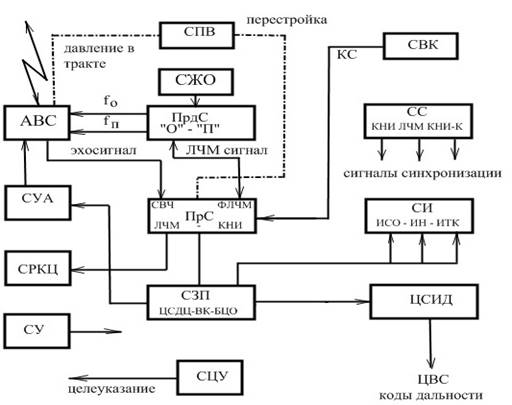
Рис 1. Структурная схема РЛС 9S35М1.
Независимо от вида излучаемого сигнала (ЛЧМ или КНИ) передатчиком Обзора «О», формирование СВЧ сигналов производится на одной из фиксированных частот.
Передатчик «О» формирует мощные когерентно-импульсные сигналы с частотой fо , излучаемые через антенну в пространство для обзора заданной зоны поиска целей и генерирующий сигнал частотой fо -28 МГц, поступающий в приемную систему для обеспечения когерентной обработки принимаемых сигналов.
Для подсвета цели и ракеты передатчик Подсвета «П» генерирует СВЧ энергию на фиксированных частотах отличных от частот передатчика «О».
СВЧ энергия с передатчиков «О» и «П» поступает по передающему волноводному тракту в антенну.
В антенне формируется диаграмма направленности на передачу и прием СВЧ сигналов. Обзор пространства производится в секторе 120º по азимуту и в 6º по углу места. Применен линейный способ сканирования (Приложение 1, с. 42).
Принятые антенной отражаемые сигналы по волноводному тракту поступают на два приемника СВЧ, куда в качестве опорного напряжения поступает непрерывный сигнал с передающей системы на частоте fо -28.
Двухканальный приемник выбран с целью повышения помехозащищенности канала углового сопровождения. С выхода СВЧ приемников сигналы промежуточной частоты 28 МГц поступают в блок сжатия ЛЧМ сигнала, где происходит их сжатие до 1,7 мкс.
Продетектированные сигналы с выхода блока сжатия ЛЧМ через систему ЦСДЦ поступают в системы углового сопровождения, индикации и цифровую систему измерения дальности.
Принятая информация отраженных сигналов и служебных меток отображается на экранах индикаторов системы индикации. Радиолокационная обстановка отображается в режиме ЛЧМ в координатах азимут-дальность, в режиме КНИ в координатах азимут-дальность-скорость.
Переход на автосопровождение цели осуществляется при наличии цели в луче, ее стробировании по дальности. При захвате цели, РЛС переходит на автосопровождение цели по угловым координатам (Приложение 1, с. 45, с. 53) и дальности.