Курсовая работа: Исследование операций и Теория систем 3
· Угловое положение. Через углы Эйлера или матрицу направляющих косинусов.
· Показания датчиков.
· Сигналы управляющих приводов. Положение ручка тяги, закрылок, элеронов, руля высоты и направления.
Модель структуры
Структура движения летательного аппарата определяется отношениями между следующими парами элементов, указанны прямые отношения (табл. 1).
Таблица 1
| Аэродинамические моменты | Угловые скорости |
| Аэродинамические силы | Угловые скорости |
| Аэродинамические силы | Аэродинамические моменты |
| Момент, вызываемый двигателем | Угловые скорости |
| Сила тяги | Скорость движения самолета |
| Сила тяги | Момент, вызываемый двигателем |
| Скорость движения самолета | Навигация |
| Навигация | Показания датчиков |
| Скорость движения самолета | Показания датчиков |
| Угловые скорости | Показания датчиков |
| Сигналы управляющих приводов | Аэродинамические моменты |
| Сигналы управляющих приводов | Аэродинамические силы |
| Сигналы управляющих приводов | Момент и сила тяги, вызываемые двигателем |
| Угловое положение | Угловые скорости |
Структурная схема
Так как в модели нас интересует функции каждого элемента системы, рассмотрим структурную схему в зависимости от сил и моментов, действующих на модель (рис. 2).
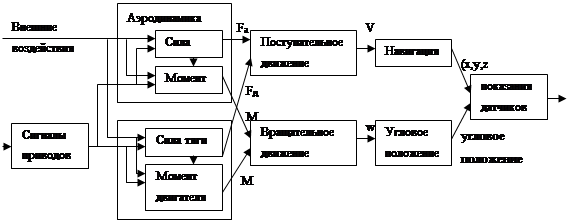
Рисунок 2.Структурная схема.
Динамическая модель
Обозначения:
– набор входных воздействий (входов) в системе – вектор управления (вход системы);
– набор выходных воздействий (выходов) в системе – набор данных получаемых с датчиков будет выходом системы;
– набор параметров, характеризующих свойства системы, постоянные во всё время рассмотрения, и влияющих на выходные воздействия системы, – конструктивные и неконструктивные параметры летательного аппарата;
– набор параметров, характеризующих свойства системы, изменяющиеся во время ее рассмотрения (параметры состояния) – линейные и угловые скорости, положение в пространстве и угловое положение, аэродинамические силы и моменты, силы и моменты в двигателе;
– параметр (или параметры) процесса в системе – t;
– правило ![]() - нелинейная зависимость скоростей и положения в пространстве летательного аппарата от вектора управления;
- нелинейная зависимость скоростей и положения в пространстве летательного аппарата от вектора управления;
– правило ![]() - нелинейная зависимость показаний датчиков от вектора управления, скоростей и положения в пространстве летательного аппарата;
- нелинейная зависимость показаний датчиков от вектора управления, скоростей и положения в пространстве летательного аппарата;
– правило ![]() - нелинейная зависимость показаний датчиков от скоростей и положения в пространстве.
- нелинейная зависимость показаний датчиков от скоростей и положения в пространстве.
Тогда модель может быть записана так:
![]()
![]()
Классификация модели
Классификация системы:
по их происхождению - искусственная система, машина;
по описанию входных и выходных процессов - c количественными переменными, непрерывная, детерминированная система;
по описанию оператора системы – параметризованная, разомкнутая, нелинейная;
по способам управления – система управляемая извне, с управлением типа регулирование;
Закономерности модели
1. Целостность. Совокупность аэродинамической модели и модели двигателя дают летательному аппарату возможность движения в воздухе.
2. Иерархичность. Совокупность управляющих элементов, датчиков, аэродинамической модели и модели двигателя дают летательному аппарату возможность управляемого движения в воздухе.
3. Коммуникативность. На полет летательного аппарата действуют температура окружающей среды, скорость и направление ветра, плотность воздуха и др.
4. Эквифинальность. Рано или поздно, самолет вынужден будет приземлится или разобьется. Т.о. скорости, ускорения, моменты и силы будут равны нулю.