Курсовая работа: Космп’ютеризована вимірювальна система вимірювання залежності кутової швидкості від часу
 (3.1)
(3.1)
В діапазоні значень кута повороту ![]() :
:
 (3.2)
(3.2)
Площа отвору, через який світло попадає на фоточутливий шар фотодіоду, є лінійною функцією кута повороту модулятора відносно діафрагми.
Вираз, який зв’язує вихідну напругу фотоприймача F1 з кутом повороту ![]() .
.
 (3.3)
(3.3)
Шляхом нескладних перетворень отримуємо вираз, який зв’язує напругу U та кут повороту модулятора відносно діафрагми.
 (3.4)
(3.4)
Як слідує з виразу (3.4), по вихідній напрузі фотоприймача F1 не можна точно визначити кутовє положення чи кутову швидкість валу об’єкту досліджень.
Тому використовується фотоприймач F2, призначення якого полягає у формуванні сигналу, який приймає значення логічної одиниці при ![]() та логічного нуля в іншому випадку. Його функціональну схему наведено на рис. 3.2, а працює він слідуючим чином.
та логічного нуля в іншому випадку. Його функціональну схему наведено на рис. 3.2, а працює він слідуючим чином.
При обертанні модулятору перекриваються прорізі 7 та 9 модулятора та діафрагми. Площа освітлюємого фоточутливого шару фотодіоду фотоприймача F2 при вище описаній формі прорізів модулятора та діафрагми змінюється за трикутним законом. Відповідно за трикутним законом змінюється і вихідна напруга UF операційного підсилювача DA1. Внаслідок того, що прорізі 7 та 8 мають рівну кутову ширину, а прорізь модулятора 8 розташована на вісі ![]() , при чому ця вісь співпадає з бісектрисою кута, проміні якого обмежують конфігурацію цієї прорізі, проміжок часу між серединами фронтів трикутної напруги співпадає з часовим проміжком формування заднього фронту напруги U. Для формування імпульсу напруги UC , який свідчить про те, що кут повороту модулятора відносно діафрагми знаходиться в межах
, при чому ця вісь співпадає з бісектрисою кута, проміні якого обмежують конфігурацію цієї прорізі, проміжок часу між серединами фронтів трикутної напруги співпадає з часовим проміжком формування заднього фронту напруги U. Для формування імпульсу напруги UC , який свідчить про те, що кут повороту модулятора відносно діафрагми знаходиться в межах ![]() , служить компаратор DA2, на неінвертуючий вхід якого подається опорна напруга UП , яка дорівнює половині амплітуди напруги UF , а на інвертуючий вхід - напруга UF .
, служить компаратор DA2, на неінвертуючий вхід якого подається опорна напруга UП , яка дорівнює половині амплітуди напруги UF , а на інвертуючий вхід - напруга UF .
Виходячи з вище сказаного, можна записати рівняння перетворення ТП.
 .
.
(3.5)
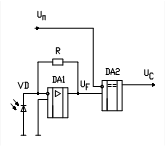
Рис. 3.2. Функціональна схема фотоприймача F2.
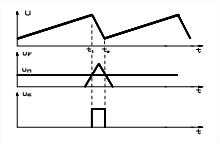
Рис. 3.3. Часові діаграми роботи ТП
Вираз, що зв’язує вимірюєму кутову швидкість з вихідною напругою ТП
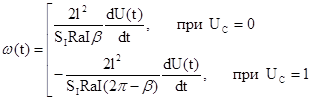 , (3.6)
, (3.6)
Рівняння, що зв’язує кут повороту модулятора відносно діафрагми з вихідною напругою ТП
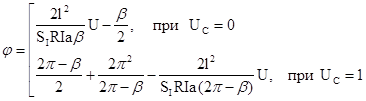 , (3.7)
, (3.7)
3.2 Розробка пристрою спряження тахометричного перетворювача з ЕОМ
Для реалізації пристрою для вимірювання та контролю кутової швидкості необхідно реалізувати пристрій для спряження тахометричного перетворювача з ЕОМ.
Розробляємий пристрій орієнтован на дослідження перехідних режимів ЕМПЕ, тобто нас в даному випадку не цікавить робота пристрою у реальному часі. Але це не значить, що його роботу у реальному часі неможливо реалізувати. Для цього необхідно змінити алгоритм його роботи так, щоб після кожного вимірювання проводилось обчислення кутової швидкості та вивід її значення.
Вихідний сигнал тахометричного перетворювача перетворюється у цифровий код за допомогою аналого-цифрового перетворювача. Розрізнювальна здатність пристрою за кутом повороту залежить від числа розрядів АЦП та визначається виразом
![]() , (3.8)
, (3.8)
де ![]() - розрізнювальна здатність за кутом повороту; n- кількість двійкових розрядів АЦП.
- розрізнювальна здатність за кутом повороту; n- кількість двійкових розрядів АЦП.
Задаємось значенням кутової ширини прорізі діафрагми ![]() =10 виходячи з умов технічного завдання
=10 виходячи з умов технічного завдання ![]() =0.10 , визначаєм необхідну кількість двійкових розрядів.
=0.10 , визначаєм необхідну кількість двійкових розрядів.