Курсовая работа: Механізм приводу щокової дробарки
Для пр икладу побудуємо план швидкостей для першого положення механізму.
Знаходимо швидкість точки А.
VA =LOA ×w1 = 0,14×13,4 = 1,88 м/с .
В довільному масштабі з довільної точки відкладаємо відрізок Рvа, що зображає швидкість точки А (перпендикулярно до кривошипа ОА в напрямку w1).
Знаходимо масштаб побудови плана швидкостей:
mv = Vа/(Рva) = 1,88/50 = 0,0376 (м/с)/мм .
Для знаходження швидкості точки B запишемо систему векторних рівнянь:
VB = VА + VBA;
VB = VC + VВC .
Точка b буде лежати на перетині лінії, яка проходить через точку a перпендикулярно до ланки OA, з лінією, що проходить через точку Рv перпендикулярно до ланки BC.
Знаходимо дійсне значення швидкості ланок механізму:
VО3В = (Рvb)×mv = 25,04×0,0376 = 0,94 м/с .
VАВ = (ab)×mv = 56,72×0,0376 =2,13м/с .
Знаходимо кутову швидкість обертання ланки O1A :
ω2 = VАB/LВA = 2,13/1,2 =1,78рад/с .
Аналогічно знаходимо кутові швидкості ланок ВС і ВD :
ω 3 = VBC/LВC = 0,5/1,2 = 0,42рад/с .
ω 4 = VС/LО4С = 0,69/0,8 = 086рад/с .
ω 5 = VО3В/LО3В=0,94/1,1 = 0,85рад/с .
Аналогічно будуємо плани швидкостей для інших положень мeханізму.
Будуємо таблицю значень лінійних і кутових швидкостей ланок механізму:
Значення лінійних та кутових швидкостей ланок механізму
| Позначення | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12/0 |
| Ра, мм | 50 | 50 | 50 | 50 | 50 | 50 | 50 | 50 | 50 | 50 | 50 | 50 |
| VА,м/с | 1,88 | 1,88 | 1,88 | 1,88 | 1,88 | 1,88 | 1,88 | 1,88 | 1,88 | 1,88 | 1,88 | 1,88 |
| Pb, мм | 25,04 | 44,48 | 55,61 | 55,34 | 40,83 | 11,57 | 26,44 | 57,89 | 67,17 | 53,51 | 27,86 | - |
| VB,м/с | 0,94 | 1,67 | 2,09 | 2,08 | 1,54 | 0,44 | 0,99 | 2,18 | 2,53 | 2,01 | 1,05 | - |
| Pc, мм | 18,4 | 33,95 | 45,46 | 48,61 | 38,22 | 11,24 | 25,43 | 52,56 | 56,18 | 41,12 | 20,22 | - |
| VC,м/с | 0,69 | 1,28 | 1,71 | 1,83 | 1,44 | 0,42 | 0,96 | 1,98 | 2,1 | 1,55 | 0,76 | - |
| АВ,мм | 56,72 | 50,81 | 35,34 | 13,01 | 13,9 | 41,99 | 63,46 | 65,93 | 43,2 | 5,91 | 28,52 | - |
| VAB,м/с | 2,13 | 1,91 | 1,33 | 0,49 | 0,52 | 1,58 | 2,39 | 2,48 | 1,62 | 0,22 | 1,07 | - |
| ВС,мм | 13,36 | 23,41 | 29,16 | 29,6 | 22,72 | 6,65 | 15,05 | 31,41 | 35,35 | 28,01 | 14,83 | - |
| VBC,м/с | 0,5 | 0,88 | 1,1 | 1,11 | 0,85 | 0,25 | 0,57 | 1,18 | 1,33 | 1,05 | 0,56 | - |
| ωАВ,рад/с | 1,78 | 1,6 | 1,1 | 0,38 | 0,43 | 1,32 | 2 | 2,1 | 1,35 | 0,18 | 0,89 | - |
| ωВС,рад/с | 0,42 | 0,73 | 0,92 | 0,93 | 0,71 | 0,21 | 0,48 | 0,98 | 1,11 | 0,88 | 0,47 | - |
| ωВО3,рад/с | 0,85 | 1,52 | 1,9 | 1,89 | 1,4 | 0,4 | 0,9 | 1,92 | 2,3 | 1,83 | 0,95 | - |
| ωСО4,рад/с | 0,86 | 1,6 | 2,14 | 2,29 | 1,8 | 0,53 | 1,2 | 2,48 | 2,63 | 1,94 | 0,95 | - |
Побудова плану прискорення важільного механізму (для положення № 8).
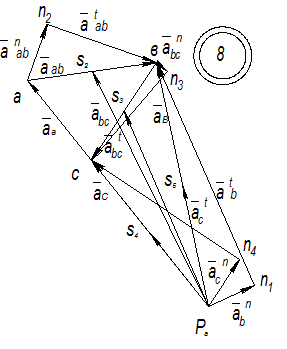
Знаходимо прискорення точки A
aA = w12·lOA = 13,42·0,14 = 25,14 м/с2 .
В довільному масштабі з довільної точки Ра паралельно кривошипу АО в напрямку, який співпадає з напрямком від точки А до т.О (так,як доцентрове прискорення) відкладаємо відрізок Раа, який зображує прискорення точки А.
Знаходимо масштаб плана прискорень:
ma = a/(Paa) = 25,14/100 =0,2514 (м/с2)/мм
Для знаходження прискорення точки B, запишемо систему векторних рівнянь:
aB = aA + aBAt + aBAn ;