Курсовая работа: Методы и средства обработки аналоговых сигналов
![]()
Среднеквадратическая ошибка при линейной интерполяции имеет вид
![]() (4)
(4)
Независимо от выбранного критерия оценки погрешности ошибка восстановления сигнала включает две аддитивные составляющие:
- погрешность квантования сигнала по уровню
 (5)
(5)
- погрешность дискретизации сигнала по времени
 (6)
(6)
Здесь n - число двоичных символов отводимых на кодирование одного отсчета, s s 2 - дисперсия сигнала, ![]() - корреляционная функция сигнала.
- корреляционная функция сигнала.
Подставив выражения (3), (4), (5), (6) в (1) получим:
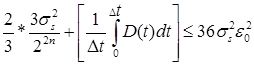 ,
,
где 
Разрешив это неравенство, как:
fi £ j (n, e ) , найдем частоты опроса датчиков в зависимости от размера разрядной сетки для кодирования одного отсчета и допустимой ошибки восстановления.
Для удобства интегрирования корреляционную функцию R(t) целесообразно разложить в ряд Маклорена с точностью до двух первых ненулевых членов ряда.
Рассчитав частоты опроса датчиков в зависимости от n построим функцию информационной производительности для каждого датчика (одного из датчиков в группе однотипных датчиков):
Bi =ni × fi
Здесь Bi - информационная производительность i -го датчика, ni - число двоичных символов отводимых на кодирование одного отсчета с i-го датчика (разрядность АЦП), fi - частота опроса i-го датчика.
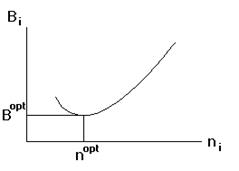
Точка минимума функции информационной производительности указывает на оптимальную производительность датчика из которой вычисляется оптимальная частота опроса:
fopt =Bopt /nopt
|
Поскольку датчики внутри групп эквивалентны по частоте, то указанный расчет достаточно произвести только для одного датчика из каждой группы.
РАСЧЕТ
1-ая группа датчиков.
a =20 [1/сек].