Курсовая работа: Микропроцессорная система управления предназначенная для использования на лесопильном заводе
Зав. каф. В.Г. Лисиенко
_____________________
Оценка проекта
Микропроцессорная система управления, предназначенная для использования на лесопильном заводе
Курсовой проект
Пояснительная записка
1909 420 000 030 ПЗ
Руководитель Мокрецов В.П.
Студент Данилов Д.
Р-311а Молоков Т.
Екатеринбург 2006
Содержание
Постановка задачи
Описание принципа действия системы
Аппаратная часть микропроцессорной системы
Программная часть микропроцессорной системы
Заключение
Постановка задачи
Требуется разработать микропроцессорную систему управления, предназначенную для использования на лесопильном заводе. Лесопильная установка имеет конвейер, который доставляет бревна к распилочным механизмам. Бревна лежат на ленте конвейера вдоль нее по одному на ширину ленты.
Искомая микропроцессорная система (в дальнейшем просто МП система) должна нести следующие функции и иметь свойства:
- Измерить диаметр каждого бревна, проходящего по конвейеру, и, если он не укладывается в рамки [20…50]см, то считать бревно бракованным и не подавать его на распилку;
- Измерить длину l бр каждого бревна и вычислить его объем Vi ; суммируя объемы неотбракованных бревен, подсчитывать общий объем распиленной древесины V S ;
- По включении питания МП система должна проводить самотестирование (POST – poweronselftest) и самоинициализацию;
- Система должна включать ОЗУ, ПЗУ, часы реального времени;
- Информация должна отображаться на восьми буквенно-цифровых индикаторах.
Цель курсовой работы – спроектировать аппаратную и программную части МП системы. Аппаратную основу системы составляет микропроцессор Z80 фирмы Zilog. В задачу курсовой работы не входит подробное проектирование приводов и других механизмов, однако их рассмотрение потребуется для написания управляющей программы.
Описание принципа действия системы
Общая структура
На рис. 1 изображена схема “вход-выход” МП системы.

Рис. 1 Структура “вход-выход” МП системы
Цифровые сигналы с датчиков диаметра и длины бревна поступают в систему, формируется сигнал отбраковки. Затем система, имитируя калькулятор, рассчитывает Vi и обновляет сумму V S , храня эти величины в памяти. В зависимости от двух кнопок управления индикацией (одна из них, будучи нажатой, переводит в отжатое положение другую) на индикаторах отображается V S или текущее время. Для начальной установки часов есть 2 кнопки управления таймером, увеличивающие на единицу часы и минуты. Имеется кнопка включения/выключения питания “Вкл”.
Обзор датчиков и способа отбраковки
Чтобы вычислить объем бревна Vi , МП система должна “знать” формулу для вычисления. Формула для расчета Vi (в предположении, что бревно – круглый цилиндр):
![]() . (1)
. (1)
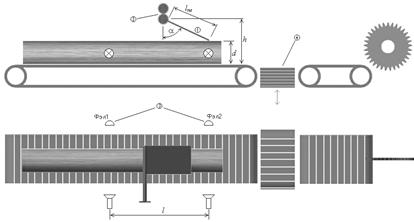
Рис. 2 Конструкция датчиков и механизма отбраковки
Чтобы найти диаметр d и длину l бр , надо знать конструкцию датчиков (рис. 2).
Датчик диаметра устроен следующим образом: бревно, двигаясь по конвейеру, отклоняет пластину -, вращающуюся на горизонтальной оси, на угол a. Этот угол через редуктор - подается на ось переменного резистора. Переменный резистор Rd включен в потенциометрический датчик (рис.3). Напряжение Ud с этого датчика подается в МП систему, где оцифровывается с помощью АЦП.

Рис. 3 Потенциометрический датчик
Расчет диаметра идет по формуле:
d = h – l пл cosa, т.е. надо знать угол a. (2)
Микропроцессор же имеет лишь напряжение Ud . По нему надо рассчитать текущее сопротивление переменного резистора Rd (см. формулу на рис.3), из него найти угол поворота оси резистора, которому соответствует это текущее сопротивление, из него, зная передаточное отношение редуктора, определить a.
Примем следующие допущения:
- номинал R доб =1 КОм; номинал Rd (переменное)=5,1 КОм; напряжение питания датчика U =12 В. Примечание: при этом диапазон Ud составляет [0; 10]В.
- особенности конструкции – а именно крепления переменного резистора и передаточного отношения редуктора – таковы, что
если a=0 (пластина вертикальна), то текущее Rd =0;
если a=90° (пластина горизонтальна), то Rd =Rd max =5,1 КОм (максимально).
--> ЧИТАТЬ ПОЛНОСТЬЮ <--