Курсовая работа: Навигационный проект перехода Малага - Неаполь т/х "Пархоменко"
Разрешающая способность по дальности на шкале 1 миля — не хуже 20...25 м; разрешающая способность по направлению — 0,9...1,2 град.
Максимальная инструментальная погрешность измерения расстояний на шкалах 1 и 2 мили — 50 м, на остальных шкалах — 1 % шкалы дальности. Максимальная инструментальная погрешность измерения направления электронным визиром 0,8 град.
Частота вращения антенны 14... 16 мин-1 .
Погрешность индикации истинного движения по скорости ±5%, по курсу — ±2 град.
Время подготовки РЛС к работе 3...4 мин, среднее время безотказной работы 300 ч. Потребляемая мощность 2750 В*А.
Примечание. Все приведенные характеристики РЛС «Наяда-5» соответствуют также 3-сантиметровой РЛС включаемой в состав РЛС «Енисей-Р».
В РЛС возможна индикация относительного движения при ориентировке по курсу и меридиану или индикация истинного движения на шкалах от 1 до 8 миль при ориентировке по меридиану. В режиме относительного движения на шкалах от 1 до 8 миль возможно смещение центра развертки относительно центра экрана в любом направлении до ⅔ радиуса экрана. Индикаторы снабжены антипараллаксными зеркальными планшетами, что позволяет производить на их поверхности графические построения при решении задач на расхождение судов. Координаты объектов наблюдения измеряются с помощью электронного визира направления ЭВН и подвижного визира дальности ПВД с электронной цифровой индикацией, выведенной под тубусы индикаторов. РЛС сопрягается с гирокомпасами типа «Курс» или «Вега» и лагами типа МГЛ и ИЭЛ.
В РЛС обеспечивается помехозащита от морских волн и гидрометеоров посредством временной регулировки усиления приемника ВРУ и регулируемого дифференцирования видеосигналов (регулируемая МПВ). Имеются метки дальности МД, отметка курса ОК, автоматическая и ручная подстройка промежуточной частоты приемника АПЧ и РПЧ,
РЛС имеют блочную конструкцию и практически полностью выполнены на интегральных схемах и полупроводниковых приборах. Приборы И, П содержат встроенные системы контроля, позволяющие измерять питающие напряжения, проверять работоспособность узлов и блоков РЛС, настраивать гетеродин и систему АПЧ.
РЛС снабжена устройством контроля общей работоспособности (КОР) с дополнительной контрольной антенной, которая укреплена снаружи прибора А на кормовых курсовых углах и соединена кабелем с прибором П.
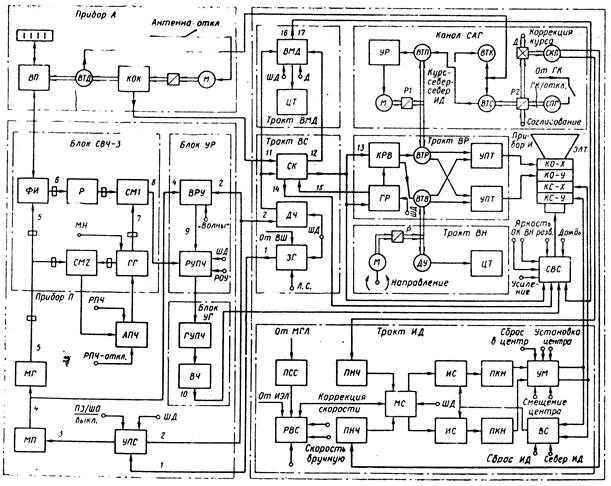
Рис. 1.2.6 Функциональная
Функциональная схема (рис. 1.2.6). Общие сведения. Функциональная схема включает в свой состав приборы (А, П, И); тракты, функционально объединяющие несколько блоков, субблоков и узлов (ВС, ВР, НМД, ВН, СВС, ИД); каналы, объединяющие несколько блоков, субблоков и узлов, но не выделяемые в таком виде в техдокументации РЛС (УПС, ПЧ, САГ); отдельные блоки (МП, СВЧ-3, АПЧ); важнейшие узлы (магнетронный генератор МГ, узел ЭЛТ).
В прибор П входят: канал управления передатчиком и синхронизации УПС, блок модулятора передатчика МП, магнетронный генератор МГ, блок СВЧ-3, канал промежуточной частоты—блоки УР (усилитель регулируемый) и УГ (усилитель главный).
Гирокомпас с косвенным управлением «Вега»

Рис. 1.2.7 Схема
На быстроходных судах и в авиации, где гирокомпас с пониженным центром тяжести чувствительного элемента имел бы недопустимо большие скоростные погрешности, применяются гирокомпасы с косвенным управлением. Принцип его работы заключается в следующем: уравновешенный гироскоп 3 (рис. 1.2.7) устанавливается в кардановом подвесе, состоящем из внутреннего вертикального кольца 1, внешнего вертикального кольца 2 и наружного вертикального полукольца 4. Карданов подвес обеспечивает гироскопу три степени свободы. Гироскоп вращается вокруг горизонтальной оси ОХ во внутреннем кардановом кольце. Внутреннее и внешнее кардановы кольца вместе с гироскопом, датчиком вертикального момента ДМz , датчиком угла ДУ, ротором датчика горизонтального момента ДМy и индикатором горизонта ИГ имеют возможность поворачиваться вокруг горизонтальной оси ОУ. Наружное полукольцо 4 может поворачиваться на любой угол относительно вертикальной оси OZ.
Если в момент включения гирокомпаса главная ось находилась в восточной половине плоскости горизонта, то под действием суточного вращения Земли она начнет видимым образом подниматься над плоскостью горизонта. Это будет замечено индикатором горизонта, который выработает сигнал, пропорциональный углу наклона главной оси. Этот сигнал усиливается усилителем У1 и подается на датчики вертикального и горизонтального моментов. Датчик горизонтального момента ДМy вызовет прецессию главной оси к западу, т.е. к плоскости меридиана, а датчик вертикального момента ДМz вызовет прецессию главной оси вниз, к плоскости горизонта. Через несколько полупериодов колебаний главная ось придет в точку динамического равновесия, которая с помощью корректирующего устройства КУ, вырабатывающего корректирующее напряжение uk , подаваемое на датчики вертикального и горизонтального моментов, может быть совмещена как с плоскостью меридиана, так и с плоскостью горизонта. Из сказанного вытекает, что датчик горизонтального момента с помощью индикатора горизонта выполняет ту же функцию, что и пониженный центр тяжести гиросферы, а датчик вертикального момента с помощью того же индикатора горизонта приводит к погашению колебаний, т.е. выполняет ту же функцию, что и гидравлический успокоитель гиросферы.
Датчик угла поворота внутреннего кольца карданова подвеса ДУ, усилитель У2 и исполнительный двигатель ИД образуют следящую систему, заставляющую наружное полу-кольцо 4 «следить» за поворотом внутреннего кольца 1 и поворачивать, кроме того, датчик курса ДК, подающий данные компасного курса к репитерам гирокомпаса и в корректирующее устройство КУ. Если в корректирующее устройство еще подать дополнительно информацию о широте плавания φ и скорости движения судна V, то корректирующее устройство способно выработать такие корректирующие напряжения, что гирокомпас станет невосприимчивым к скорости движения объекта (судна, самолета), (т. е. не будет иметь скоростной девиации.
Отечественная промышленность выпускает судовой гирокомпас с косвенным управлением «Вега», который может работать в режиме корректируемого гирокомпаса и в режиме гироазимута.
В режиме гироазимута разрывается электрическая цепь от индикатора горизонта к датчику горизонтального момента. Датчик вертикального момента с помощью индикатора горизонта будет удерживать главную ось в плоскости горизонта, а чтобы главная ось прецессировала вместе с меридианом (хотя она может быть отклонена на любой угол от меридиана), т. е. сохраняла неизменным свое направление в азимуте, на датчик горизонтального момента подается корректирующее напряжение, пропорциональное вертикальной составляющей угловой скорости суточного вращения Земли с учетом движения судна. Гироазимуткомпас «Вега» имеет следующие эксплуатационно-технические характеристики: точность показания ±0,8° в широтах до 70° и ±1,5° в диапазоне широт от 70 до 80°. При маневрировании в широтах до 70° точность показаний может снизиться до ±2,0°, а в широтах от 70 до 80° — до ±2,5°.
В условиях качки погрешность гирокомпаса не превышает ±1,5° в широтах до 70° и ±2,0° в широтах от 70 до 80°.
Гирокомпас не имеет девиации затухания и скоростной девиации при скорости хода до 70 уз.
Существенное уменьшение инерционных девиаций корректируемого гирокомпаса достигнуто увеличением периода собственных незатухающих колебаний чувствительного элемента до 150 мин и использованием индикатора горизонта с нелинейной характеристикой.
Точность показаний прибора в режиме гироазимута при скорости судна до 70 уз характеризуется дрейфом ±1,0 град/ч в широтах до 70° и ±1,5 град/ч в широтах от 70 до 80°.
Рабочая температура поддерживающей жидкости гироазимуткомпаса «Вега» составляет 73°С, поэтому гирокомпас не нуждается в принудительном охлаждении. Питается от судовой сети трехфазного переменного тока частотой 50 Гц напряжением 220 или 380 В через агрегат питания АМГ-202. Чувствительный элемент гирокомпаса питается переменным трехфазным током частотой 500 Гц напряжением 40 В.
Гироазимуткомпас имеет устройство ускоренного приведения в меридиан. Время приведения в меридиан в этом случае 60 мин.
В состав комплекта гироазимуткомпаса «Вега» входят следующие приборы.
Прибор ВГ-1А — основной прибор. В нем размещены трехстепенный поплавковый чувствительный элемент с жидкостно-торсионным подвесом, двухканальная. следящая система, двухканальная система косвенного управления, система терморегулирования.