Курсовая работа: Организация управления гибким производственным комплексом на основе системы ЧПУ

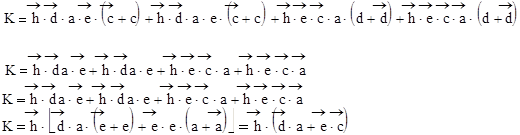
Производим упрощение по законам алгебры логики.
![]()
формула записана правильно.
8. Составление бесконтактно логической схемы
На основании функции, составленных ранее строим бесконтактную логическую схему.
При разработке приняты следующие обозначения:
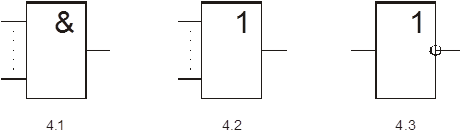
Рисунок 4 – Условные графические обозначения элементов в бесконтактной логической схеме.
На рисунке 4.1 представлен логический элемент "И" (умножение).
На рисунке 4.2 представлен логический элемент "ИЛИ" (сложение).
На рисунке 4.3 представлен логический элемент "НЕ" (инверсия или отрицание).
Построение логической схемы представим на примере – составим бесконтактную логическую схему для управления приводом перемещения роботом К.
Ранее была проведена проверка формулы составленной для привода К.
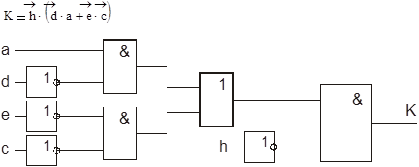
Рисунок 5 - Бесконтактная логическая схема для элемента К.
9. Составление управляющей программы
Перед написанием программы проведем детализацию дублеров и напишем соответствие позиций сети Петри адресом ОЗУ контроллера NS-915. Представим данную операцию в виде таблицы:
Таблица 3 – Описание и адресация позиций сети Петри.
| № п/п | Обозн. | Функциональное описание | Адрес |
| d0 | Начальное состояние | ||
| 1 | P0 | Начальное состояние | 2000 |
| d7 | Загрузка станка роботом | ||
| 2 | P1 | Подвод транспортером детали | 2001 |
| 3 | P2 | Опускание робота | 2002 |
| 4 | P3 | Схват детали | 2003 |
| 5 | P4 | Подъем робота | 2004 |
| 6 | P5 | Перемещение робота | 2005 |
| 7 | P6 | Опускание робота | 2004 |
| 8 | P7 | Поворот робота и зажим детали на станке | 2006 |
| d11 | Загрузка станка станочным материалом | ||
| 9 | P8 | Отпускание детали | 2003 |
| 10 | P9 | Подъем робота | 2004 |
| d6 | Обработка детали | ||
| 11 | P10 | Включение подач | 2007 |
| 12 | P11 | Включение главного привода | 2008 |
| d12 | Разгрузка станка станочными механизмами | ||
| 13 | P12 | Опускание робота | 2004 |
| 14 | P13 | Схват детали | 2003 |
| 15 | P14 | Отвод пиноли | 2006 |
| d8 | Разгрузка станка роботом | ||
| 16 | P15 | Подъем робота | 2004 |
| 17 | P16 | Поворот робота и передвижение | 2009 |
| d10 | Отвод робота | ||
| 18 | P17 | Опускание робота | 2004 |
| 19 | P18 | Отпускание детали | 2003 |
| 20 | P19 | Подъем робота | 2004 |
| 21 | P20 | Передвижение робота | 2010 |
На основе таблицы запишем управляющую программу:
| 0000 | LD | 1007 | Описание начального состояния |
| 0001 | *C | 1012 | |
| 0002 | *C | 1021 | |
| 0003 | *C | 1011 | |
| 0004 | *C | 1014 | |
| 0005 | *C | 1025 | |
| 0006 | *C | 1026 | |
| 0007 | WR | 2000 | |
| 0008 | BR | 1130 | |
| 0009 | JM | 0000 | |
| 0010 | LD | 1025 | Задание функции А |
| 0011 | *C | 1026 | |
| 0012 | *C | 1009 | |
| 0013 | *C | 1010 | |
| 0014 | *C | 1013 | |
| 0015 | WR | 2008 | |
| 0016 | BR | 0010 | |
| 0017 | JM | 0018 | |
| 0018 | LD | 1025 | Задание функции В |
| 0019 | *C | 1026 | |
| 0020 | *C | 1009 | |
| 0021 | *C | 1010 | |
| 0022 | *C | 1013 | |
| 0023 | *C | 1016 | |
| 0024 | WR | 1007 | |
| 0025 | BR | 0018 | |
| 0026 | JM | 0027 | |
| 0027 | LD | 1025 | |
| 0028 | *C | 1026 | Описание функции С |
| 0029 | *C | 1009 | |
| 0030 | *C | 1010 | |
| 0031 | *C | 1016 | |
| 0032 | *C | 1013 | |
| 0033 | *C | 1017 | |
| 0034 | WR | 2007 | |
| 0035 | BR | 0027 | |
| 0036 | JM | 0037 | |
| 0037 | LD | 1025 | Описание функции D |
| 0038 | *C | 1026 | |
| 0039 | *C | 1009 | |
| 0040 | *C | 1010 | |
| 0041 | *C | 1016 | |
| 0042 | *C | 1013 | |
| 0043 | *C | 1003 | |
| 0044 | *C | 1021 | |
| 0045 | WR | 1007 | |
| 0046 | BR | 0037 | |
| 0047 | JM | 0048 | |
| 0048 | LD | 1025 | Описание функции Е |
| 0049 | *C | 1026 | |
| 0050 | *C | 1009 | |
| 0051 | *C | 1010 | |
| 0052 | *C | 1016 | |
| 0053 | *C | 1013 | |
| 0054 | *C | 1019 | |
| 0055 | *C | 1018 | |
| 0056 | WR | 2007 | |
| 0057 | BR | 0048 | |
| 0058 | JM | 0059 | |
| 0059 | LD | 1012 | Описание функции F |
| 0060 | *C | 1011 | |
| 0061 | *C | 1006 | |
| 0062 | *C | 1007 | |
| 0063 | WR | 2001 | |
| 0064 | BR | 0059 | |
| 0065 | JM | 0066 | |
| 0066 | LD | 1004 | Описание функции G |
| 0067 | *C | 1013 | |
| 0068 | *C | 1014 | |
| 0069 | *C | 1018 | |
| 0069 | LD | 1006 | |
| 0070 | *C | 1014 | |
| 0071 | *C | 1018 | |
| 0072 | *C | 1004 | |
| 0072 | + | ||
| 0073 | LD | 1003 | |
| 0074 | *C | 1002 | |
| 0075 | *C | 1006 | |
| 0076 | + | ||
| 0077 | LD | 1007 | |
| 0078 | *C | 1012 | |
| 0079 | + | ||
| 0080 | LD | 1007 | |
| 0081 | *C | 1008 | |
| 0082 | *C | 1006 | |
| 0083 | *C | 1013 | |
| 0084 | + | ||
| 0085 | WR | 2004 | |
| 0086 | BR | 0066 | |
| 0087 | JM | 0088 | |
| 0088 | LD | 1004 | |
| 0089 | *C | 1006 | |
| 0090 | *C | 1013 | |
| 0091 | WR | 1006 | |
| 0092 | BR | 0088 | |
| 0093 | JM | 0094 | |
| 0094 | LD | 1018 | Описание функции I |
| 0095 | *C | 1014 | |
| 0096 | *C | 1009 | |
| 0097 | *C | 1010 | |
| 0098 | *C | 1026 | |
| 0099 | LD | 1026 | |
| 0100 | *C | 1006 | |
| 0101 | *C | 1014 | |
| 0102 | + | ||
| 0103 | WR | 2006 | |
| 0104 | BR | 0094 | |
| 0105 | JM | 0106 | |
| 0106 | LD | 1006 | Описание функции J |
| 0107 | *C | 1018 | |
| 0108 | LD | 1006 | |
| 0109 | *C | 1008 | |
| 0110 | + | ||
| 0111 | LD | 1006 | |
| 0112 | *C | 1002 | |
| 0113 | + | ||
| 0114 | WR | 2003 | |
| 0115 | BR | 0106 | |
| 0116 | JM | 0117 | |
| 0117 | LD | 1007 | Описание функции К |
| 0118 | *C | 1004 | |
| 0119 | *C | 1001 | |
| 0120 | LD | 1007 | |
| 0121 | *C | 1005 | |
| 0122 | *C | 1003 | |
| 0123 | + | ||
| 0124 | WR | 2005 | |
| 0125 | BR | 0117 | |
| 0126 | JM | 0127 | |
| 0127 | LD | 2000 | Начальное состояние и переход на состояние 1 |
| 0128 | BR | 0130 | |
| 0129 | JM | 0000 | |
| 0130 | LD | 2001 | |
| 0131 | BR | 0130 | Переход из состояния 1 в состояние 2 |
| 0132 | LD | 2002 | |
| 0133 | BR | 0132 | Переход из состояния 2 в состояние 3 |
| 0134 | LD | 2003 | |
| 0135 | BR | 0134 | Переход из состояния 3 в состояние 4 |
| 0136 | LD | 2004 | |
| 0137 | BR | 0136 | Переход из состояния 4 в состояние 5 |
| 0138 | LD | 2005 | |
| 0139 | BR | 0138 | Переход из состояния 5 в состояние 6 |
| 0140 | LD | 2004 | |
| 0141 | WR | 1033 | Переход из состояния 6 в состояние 7 |
| 0142 | BR | 0140 | |
| 0143 | LD | 2006 | |
| 0144 | WR | 1035 | Переход из состояния 7 в состояние 8 |
| 0145 | BR | 0143 | |
| 0146 | LD | 2003 | |
| 0147 | WR | 1036 | Переход из состояния 8 в состояние 9 |
| 0148 | BR | 0146 | |
| 0149 | LD | 2004 | |
| 0150 | WR | 1033 | Переход из состояния 9 в состояние 10 |
| 0151 | BR | 0149 | |
| 0152 | LD | 2007 | |
| 0153 | WR | 1027 | Переход из состояния 10 в состояние 11 |
| 0154 | BR | 0152 | |
| 0155 | LD | 2008 | |
| 0156 | WR | 1028 | Переход из состояния 11 в состояние 12 |
| 0157 | WR | 1029 | |
| 0158 | WR | 1030 | |
| 0159 | WR | 1031 | |
| 0160 | BR | 0155 | |
| 0161 | LD | 2004 | Переход из состояния 12 в состояние 13 |
| 0162 | WR | 1033 | |
| 0163 | BR | 0161 | |
| 0164 | LD | 2003 | |
| 0165 | WR | 1036 | Переход из состояния 13 в состояние 14 |
| 0166 | BR | 0164 | |
| 0167 | LD | 2006 | |
| 0168 | WR | 1035 | Переход из состояния 14 в состояние 15 |
| 0169 | BR | 0167 | |
| 0170 | LD | 2004 | |
| 0171 | WR | 1033 | Переход из состояния 15 в состояние 16 |
| 0172 | BR | 0170 | |
| 0173 | LD | 2009 | |
| 0174 | WR | 1037 | Переход из состояния 16 в состояние 17 |
| 0175 | BR | 0173 | |
| 0176 | LD | 2004 | |
| 0177 | WR | 1037 | Переход из состояния 17 в состояние 18 |
| 0178 | BR | 0176 | |
| 0179 | LD | 2003 | |
| 0180 | WR | 1036 | Переход из состояния 18 в состояние 19 |
| 0181 | BR | 0179 | |
| 0182 | LD | 2004 | |
| 0183 | WR | 1033 | Переход из состояния 19 в состояние 20 |
| 0184 | BR | 0182 | |
| 0185 | LD | 2010 | |
| 0186 | WR | 1037 | Переход из состояния 20 в состояние 30 |
| 0187 | BR | 0185 | |
| 0188 | JM | 0127 | Повторение цикла |
Список литературы
1. "Системы управления автоматических машин" Рабинович А. Н. "Техника", 1973, 440 с.
2. "Логическое управление дискретными процессами" Юцицкий С. А. М.: "Машиностроение", 1987, 176 с.
3. "Металлорежущие станки" учебник для машиностроительных вузов" Пуша В. Э., М.: "Машиностроение", 1985, 256 с.
4. "Синтез микропрограммных автоматов" Баранов С. И., Л.: "Энергия", 1979, 232 с.
5. "Математическое обеспечение процессорных устройств ЧПУ" Сосонкин В. Л., М.: "НИИМАШ", 1981, 80 с.
6. "Автоматизированные технологические комплексы", М.: "НИИМАШ", 1981, 103 с.
7. "Автоматические станочные системы", М.: "Машиностроение", 1982, 319 с.