Курсовая работа: Приемник аналоговых сигналов с амплитудной модуляцией

![]()
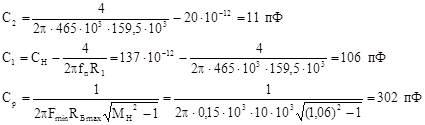
Емкости конденсаторов:
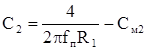 , где:
, где:
См2 = 15…20 пФ – емкость монтажа входной цепи УНЧ
Коэффициент фильтрации напряжения промежуточной частоты для последовательного детектора:

При рассчитанном КФ обеспечится заданное в ТЗ ослабление на промежуточной частоте Sпч = 40 dВ.
Из соотношения ![]() по рис. 9.2 [1] находим Кд = 0,798 ≈ 0,8.
по рис. 9.2 [1] находим Кд = 0,798 ≈ 0,8.
Выбор и расчет схемы АРУ
АРУ обеспечивает требуемое относительное постоянство выходного напряжения приемника в условиях изменения мощности принимаемых сигналов.
Инерционные системы АРУ с обратной связью представляют собой замкнутую нелинейную систему автоматического регулирования, содержащую усилительный тракт приемника с регулируемым коэффициентом усиления и цепь регулирования. Последняя состоит из детектора АРУ, фильтра и усилителя. В общем случае, может быть еще схема задержки.
|
Имеющаяся в нашем распоряжении регулировочная характеристика является нелинейной. Наиболее часто при анализе и расчете систем АРУ пользуется ее кусочно-линейной аппроксимацией. В подавляющем большинстве случаев для инженерного расчета оказывается вполне допустима аппроксимация тремя отрезками прямой (рис.8). Основным параметром регулировочной характеристики является ее крутизна Sр . Требования к эффективности системы АРУ определяются заданием коэффициентов:
 ;
; 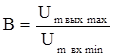 .
.
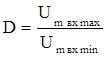
В процессе работы системы АРУ усиление каскадов приемника, охваченных цепью регулирования, изменяется от максимального значения Ко до некоторого минимального значения Кmin , определяемого наибольшим уровнем входного сигнала. Относительное изменение усиления представляет собой глубину регулирования

Она определяется только регулируемыми каскадами. Коэффициенты D и В определяют необходимые требования к глубине регулирования, а тем самым и к виду регулировочной характеристики.
![]()
В нашем случае: 
 , т.к.
, т.к.  , то работа системы АРУ будет проходить на «хвосте» регулировочной характеристики с меньшим значением ее крутизны и большим регулирующим напряжением. При таком режиме работы необходимую эффективность системы АРУ можно реализовать с помощью дополнительного усиления в цепи регулирования. Требования к усилению в цепи регулирования, т.е. к произведению коэффициента передачи детектора АРУ Кд и коэффициента усиления усилителя АРУ Ку можно найти:
, то работа системы АРУ будет проходить на «хвосте» регулировочной характеристики с меньшим значением ее крутизны и большим регулирующим напряжением. При таком режиме работы необходимую эффективность системы АРУ можно реализовать с помощью дополнительного усиления в цепи регулирования. Требования к усилению в цепи регулирования, т.е. к произведению коэффициента передачи детектора АРУ Кд и коэффициента усиления усилителя АРУ Ку можно найти:
 , где:
, где:
В = 1,995 – из ТЗ
Um вых min – напряжение на выходе последнего каскада, охваченного цепью регулирования, при входном сигнале приемника, соответствующем его чувствительности. Из [5] находим, что Um вых min ≈ 63 мВ.

Такое усиление (Ку ) должен обеспечить усилитель АРУ, реализованный в микросхеме К174ХА2. Очевидно, что такое усиление достижимо, т.е. обеспечена заданная глубина регулировки.
В используемой микросхеме охвачены регулировкой n=3 каскада УПЧ.
Динамические свойства системы АРУ с ОС определяются, с одной стороны, постоянными времени фильтров и других инерционных элементов цепи регулирования, а с другой некоторым обобщенным параметром системы М = Кд Ку Sр um вх . Максимальное быстродействие системы АРУ будет иметь место при наибольшем значении указанного параметра, которое приближенно для n ≤ 6 можно считать равным:
