Курсовая работа: Проектирование и расчёт микронного многооборотного микроиндикатора
2. Определяем передаточные числа от валов III, II к валу I:

3. Определяем люфтовую погрешность сопряженных пар для степени точности 7H и m=0,5:
![]()
4. Вносим поправки на вид сопряжения, степень точности и модуль каждой пары. Колеса изготавливаются для класса точности 6G:
![]()
5. Находим суммарную угловую погрешность:
![]()
6. Упругим мертвым ходом можно пренебречь, ввиду малой нагрузки на выходной вал ![]() Отсюда суммарная величина мертвого хода
Отсюда суммарная величина мертвого хода ![]()
7. Находим собственные кинематические погрешности всех колес:

8. Определяем суммарную кинематическую погрешность передачи:
![]()
9. Находим общую погрешность передачи:
![]()
Определяем суммарную погрешность редуктора.
1. Пересчитываем все погрешности передачи на линейное перемещение стрелки ![]() :
:
1.1. Синусный механизм
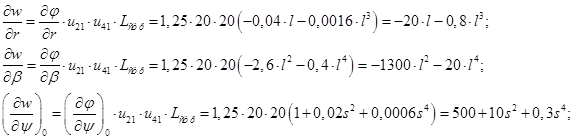
1.2. Кулисный механизм
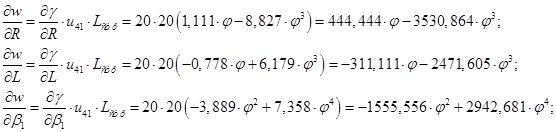
1.3. Зубчатый редуктор
![]()
2. Находим выражение для суммарной ошибки:
![]()
где ![]()
3. Переводим к безразмерному аргументу ![]() , получаем:
, получаем:
![]()
(остальные слагаемые не учитываем, так как они значительно меньше написанных).