Курсовая работа: Проектирование цифрового фазового звена
Содержание
1. Введение
2. Анализ задачи и ее формализация
3. Разработка и обоснование общего алгоритма функционирования устройства и его описание
4. Синтез операционного узла (выбор и обоснование аппаратной части устройства)
5. Синтез управляющего узла (разработка программы на языке микропроцессора)
6. Составление принципиальной схемы устройства и ее описание
7. Оценка быстродействия устройства
8. Порядок расчета АЧХ фильтра
9. Заключение
10. Список использованных источников
1. Введение
В радиотехнике, наряду с методами аналоговой обработки сигналов, широкое распространение получили методы и устройства цифровой обработки сигналов, реализованные на основе микропроцессоров (МП). Применение МП в радиотехнических системах (РТС) существенно улучшает ихтехнико-экономические показатели (потребление энергии, габариты, стоимость и т.д.), открывает широкие возможности реализации сложных алгоритмов цифровой обработки сигналов (ЦОС).
Применение МП целесообразно в тех случаях, когда реализация определенных функций РТС с использованием "жесткой логики" требует большого количества микросхем (более 30).
Микропроцессоры находят применение при решении широкого круга радиотехнических задач, таких как построение радиотехнических измерителей координат, сглаживающих и экстраполирующих фильтров устройств вторичной обработки сигналов, специализированных вычислительных устройств бортовых навигационных комплексов, устройств кодирования и декодирования сигналов, весовой обработки пачечных сигналов в радиолокации, различного рода измерительных устройств и т.п.
При создании радиоэлектронной аппаратуры используются три основных подхода реализации цифровых устройств: аппаратный, программный и аппаратно- программный. При аппаратном получают цифровые устройства с традиционной "жесткой'' логикой, что обеспечивает наибольшее быстродействие устройств, но требует трудоемкой разработки индивидуальной структуры цифрового устройства – спецпроцессора. При программном подходе цифровое устройство реализуется в виде программы для готовой универсальной ЭВМ, в качестве которой можно использовать микроЭВМ, предназначенную для встраивания непосредственно в разрабатываемые блоки. Аппаратно-программный подход предполагает разработку как программных, так и аппаратных средств. К ним относятся цифровые устройства, реализованные как автоматы с микропрограммным управлением и хранимой в ПЗУ программой, а также цифровые устройства, построенные на основе микропроцессора. Аппаратно-программный подход при использовании современных интегральных схем позволяет в наибольшей степени учесть особенности решаемых задач.
Выбор варианта построения цифрового устройства в каждом конкретном случае осуществляется с учетом всех требований технического задания. Применение "жесткой" логики оправдано в двух основных случаях I) при необходимости получения предельно бысокого быстродействия; 2) при построении относительно несложных устройств на интегральных схемах малой и средней степени интеграции.
Если же от устройства требуетсягибкость, т.е. способность изменения функций программным путем в процессе работы или расширения круга решаемых задач, тогда становится целесообразным использование микропроцессоров (МП), Применение оправдано при построении устройств большой сложности, если быстродействие МП оказывается достаточным. Ограничения, связанные с недостаточным быстродействием МП, можно преодолеть построением многопроцессорных устройств или выполнением части функций с помощью специально разработанных аппаратных средств, работающих совместно с МП.
Наибольшая экономичность цифрового устройства по объему оборудования и другим эксплуатационным параметрам, а также наименьшая трудоемкость проектирования достигаются при использовании однокристальных МП.
2. Анализ задачи и её формализация
Минимальная конфигурация МП-системы на основе набора К1821, характеристики АЦП (572ПВ3) и технические требования по обеспечению их работы определяют функциональную схему фильтра, приведенную на рис.1.
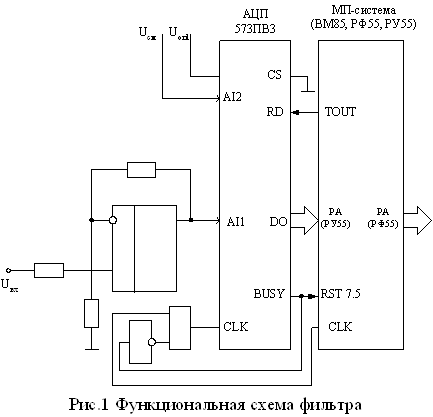
Входное напряжение UВХ через согласующий усилитель подается на вход AI1 АЦП. Согласующий усилитель включен с целью увеличения размаха входного напряжения до требуемого для работы АЦП. Сдвиг входного напряжения в рабочую область АЦП осуществляет напряжение UC М , поступающее на вход AI2. Опорное напряжение UОП1 требуется для работы АЦП, входящего в состав БИС 572ПВ3.
Коэффициент усиления усилителя: КСОГЛ = DUАЦП /DUВХ = 2,5.
Напряжение смещения : UСМ = DUАЦП /2 = +5 В.
Опорное напряжение : UОП1 = - 10 В.
Сброс и запуск АЦП осуществляется по входу /RD (при постоянном значении /CS = 0) импульсом низкого уровня с выхода TOUT таймера, настроенного на формирование импульсов с частотой дискретизации FД =2.0 кГц.
Тактирование регистра последовательных приближений АЦП осуществляется тактовыми импульсами CLK МП-системы, поступающими через логическую схему И на тактовый вход СLK АЦП. Высокий уровень сигнала /BUSY, устанавливающийся при окончании преобразования, прекращает поступление импульсов CLK на тактовый вход АЦП.
Тактовая частота преобразования АЦП не должна превышать 1,5 МГц, поэтому примем FCLK АЦП = FCLK МП = 1,5 МГц.
Время преобразования текущего отсчета входного напряжения в код составляет 8 периодов тактовой частоты: tПР = 8TCLK АЦП = 5,3 мкс.
Схема выборки и хранения (СВХ) необходима, если за время tПР = 5,3 мкс самый быстроизменяющийся сигнал (синусоида с частотой
fВ = 0,5FД и с максимальной амплитудой) изменяется на относительную величину, превышающую половину шага квантования h:
0,5h = 0,5/28 = 0,00195. Максимальное изменение синусоиды на интервале tПР равно Dx = sin 2pfВ tПР =0,033. Dx > 0,5h, поэтому СВХ для хранения текущего отсчета сигнала на время преобразования АЦП требуется.
Частота дискретизации FД = 2,0 кГц формируется аппаратным таймером РУ55, в котором частота переполнения FП в режиме 3 равна FД При использовании в качестве входных импульсов таймера тактовых импульсов CLK МП-системы (FCLK МП = 1,5 МГц) исходное состояние таймера равно NТАЙМЕРА = FCLK МП /FД = 750(10) = 00 0010 1110 1110 (2) . При дополнении 14-разрядного двоичного кода NТАЙМЕРА двумя битами 11, задающими режим 3, получаем байты NСТ = 1100 0010(2) = C2(16) , NМЛ = 1110 1110 (2) = EE(16) , которые загружаются в таймер при инициализации фильтра.
Согласование кода АЦП и МП необходимо, так как числовые значения на выходе АЦП не отображают значения знакопеременного входного сигнала вследствие подачи на вход AI2 напряжения смещения UСМ . Согласование можно выполнить смещением диапазона изменения чисел на выходе АЦП в отрицательную область путем вычитания из каждого значения выходного кода константы 1000 0000(2) - половины от максимального значения выходного кода АЦП (прибавление дает тот же результат).
Форма представления чисел (числовых значений отсчетов входного сигнала) – правильная дробь с фиксированной запятой: старший разряд – знаковый, запятая, остальные двоичные разряды – числовые. Таким образом, числовые значения входного сигнала изменяются в диапазоне от – 1 до + 1.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--