Курсовая работа: Проектирование управляющего микропроцессорного устройства
Необходимо предусмотреть светодиод зуммер аварийной сигнализации
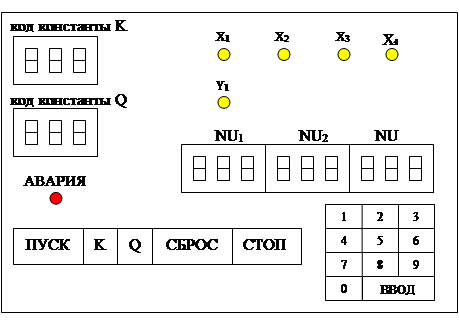
Рис. 3. Пульт управления оператора.
Назначение управляющих клавиш:
| Клавиша | Функции |
| Пуск | Переводит систему в режим выполнения алгоритма управления. В этом режиме на индикаторы выводится текущее значение принимаемых с выводов АЦП 8-разрядных двоичных кодов NU1, NU2, NU3 |
| K | Перевод в режим ввода кода 8-разрядной двоичной константы K; по умолчанию на все индикаторы выводится 000. Набирается произвольное число цифр (со сдвигом влево). Набор фиксируется по нажатию Ввод. Если код константы равен нулю просто нажимается клавиша Ввод. |
| Q | Переводит в режим ввода кода 8-разрядной двоичной константы Q. |
| Сброс | RESET – начальная установка и переход в режим набора K и Q |
| Стоп | Режим прерывания программы |
| Ввод | Фиксирует текущий набор и переходит к следующему набору. |
| Авария | Сигнал красного цвета – отказ системы, сигнал не горит – система в работоспособном состоянии. |
|
NU1 NU2 NU3 | Дисплей вывода 8-разрядных двоичных кодов NU1, NU2, NU3, принимаемых с АЦП |
На рисунке представлена принципиальная схема микроЭВМ:

Рис.4Принципиальная схема микроЭВМ
2. Алгоритм 1:
Для формирования управляющего воздействия y1 снимается информация с цифровых датчиков x1, x2, x3 x4 и вычисляется значение булевой функции (т.е. логической) f1(x1, x2, x3 x4 ):
![]() vx4
vx4
При единичном значении f1 вырабатывается управляющий сигнал y1 длительностью t1. Это означает, что через время t1 после выдачи y1 необходимо выработать y1=0.
Блок-схема программы

3. Алгоритм 2
При обработке информации с аналоговых датчиков МПУ принимает коды NU1 и NU2 с выходов АЦП и код константы k с тумблерного регистра пульта управления. Далее вычисляются значения функции NU = f2 (NU1, NU2, k) и сравнивается с константой Q1, хранящейся в ПЗУ. В зависимости от результатов сравнения вырабатывается один из двух управляющих сигналов Y2 или Y3 заданной длительности по следующему правилу. Если NU < Q, то выдать Y2 длительностью t2, иначе выдать Y3 длительностью t3. Далее формируется управляющее воздействие Y4, для чего с АЦП вводится значение NU3 и производится вычисление по формуле:
![]() ,
,
и значение Y4 в виде 8-разрядного кода выдается на вход АЦП.
Все двоичные константы и переменные, участвующие в вычислениях NU1, NU2, k, Q, Y4 рассматриваются как целые без знака.
Блок-схема программы

Заключение
В ходе данной курсовой работы, нами были составлена принципиальная схема микроЭВМ на базе микропроцессора MC68HC11E9, два алгоритма управления им. В целом нами при разработке получены те знания, которые в будущем помогут в профессиональной деятельности.
Список использованной литературы:
1. Руппель А.А. Лекции по МПУ Автоматики. 2007г.
2. А.П. Жмакин. Микропроцессорные системы для автоматизации технологических процессов.